Algorithm Characteristics
- Model-Free
- Value-Based
- Incremental
- Function Representation
1. State Value Estimation
就是在做 Policy Evaluation,但是没法 search for optimal policy
1.1 Problem Formulation
Given
Ground Truth State Value Function to approximate State Value, where is its weight
Goal
- Find an optimal weight
such that can best approximate for every
1.2 Objective Function
一共有三种 Objective Function,不过我们之后暂且先在 True Value Error 的基础上探讨
1.2.1 True Value Error
Value Function Approximation 这种方法所用的目标函数如下
关于 notation:
where state random variable
求 Expectation 本质上是求关于该 random variable 的 average,因此需要选定
Uniform Distribution
即简单粗暴地认定 all the states are equally important,设每个 state 的概率均为
,此时 这种做法显然完全不尊重 Markov Process 的 dynamics
Stationary Distribution
也叫 Steady-State Distribution,描述的是一个 Markov Process 的 long-run behavior,设置每个 state 的概率为
where
denotes the stationary distribution of the Markov Process under policy 此时
其实就是拿一个 Policy
去疯狂 rollout,理论上次数够多,那么每个 state 被访问到的概率就会慢慢收敛到固定值上,被访问次数更多的 state 在 objective function 中就能获得更高的权重 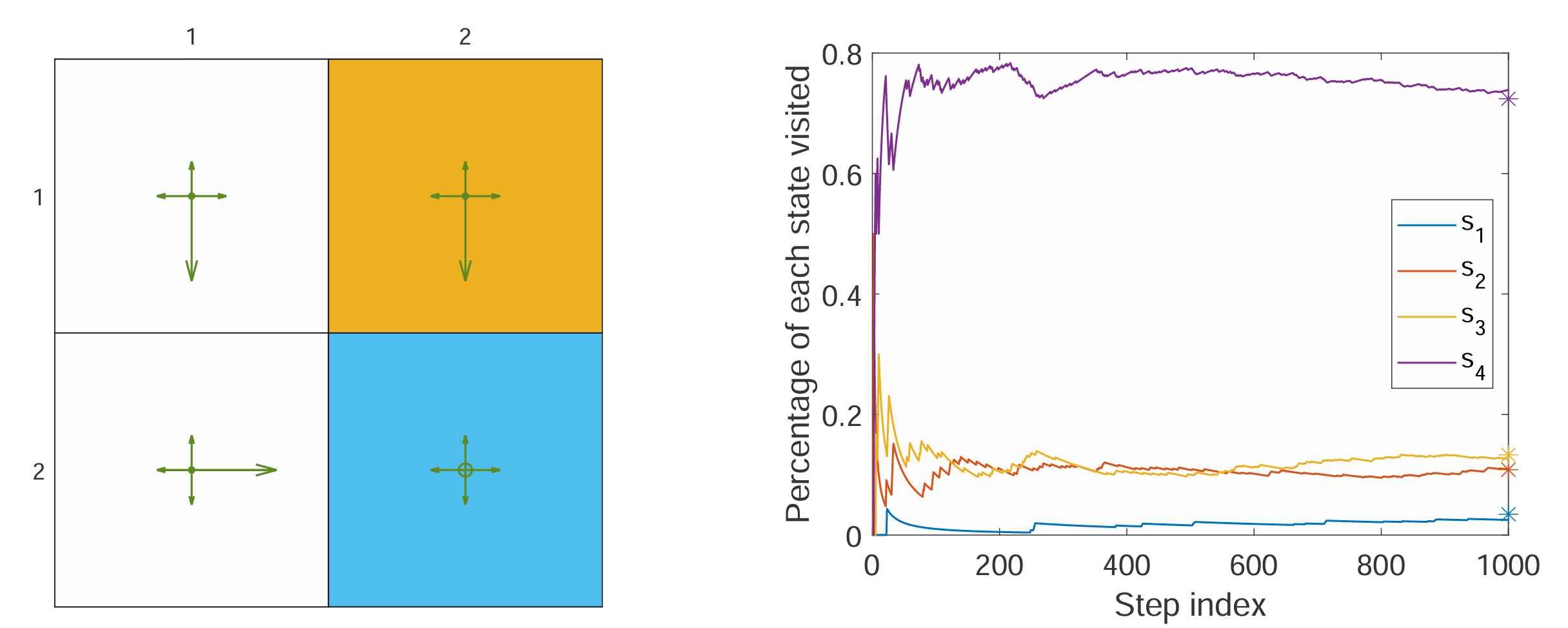
上图中,左图为一个 4 个 states 的 grid world 和
-greedy policy ( ) ,右图的曲线表示随 step 变化 4 个 states 被访问到的概率,图中最右侧不同颜色的 代表着 4 个 states 被访问到的 probability 的理论值 这个理论值也是可以计算的,recall the matrix-vector form of Bellman Expectation Equation and State-Transition Matrix
where
is the number of states,上图中右图每 step 一次就会更新一次 直到 step 够久了,
就会变成一个 fixed point(或者说 converge to fixed value) 例子中的 state transition matrix 是
计算出的
理论值为
1.2.2 Bellman Error
如果
where
1.2.3 Projected Bellman Error
有时候由于所选择的
where
1.3 Optimization Algorithm
We can use Gradient Descent to minimize the Objective Function
where
可以用 stochastic gradient 替代计算 expectation 的步骤
由于需要 True State Value
Monte Carlo
Use
,where is the discounted return starting from state in the episode Temporal Difference
Use
by the spirit of TD method 需要注意的是,这个公式 minimize 的 objective function 本质上并不是 1.2.1 True Error,而是 1.2.3 Projected Bellman Error
1.4 Function Approximator
如何选择
Neural Network
如今被广泛使用的选择,用 NN 的 nonlinearity 把它当成一个万能的 function approximator,这在 3.2 Deep Q-Learning (DQN) 里会详细聊
Linear Function
这个算是前朝遗物,但是能帮助理解
where
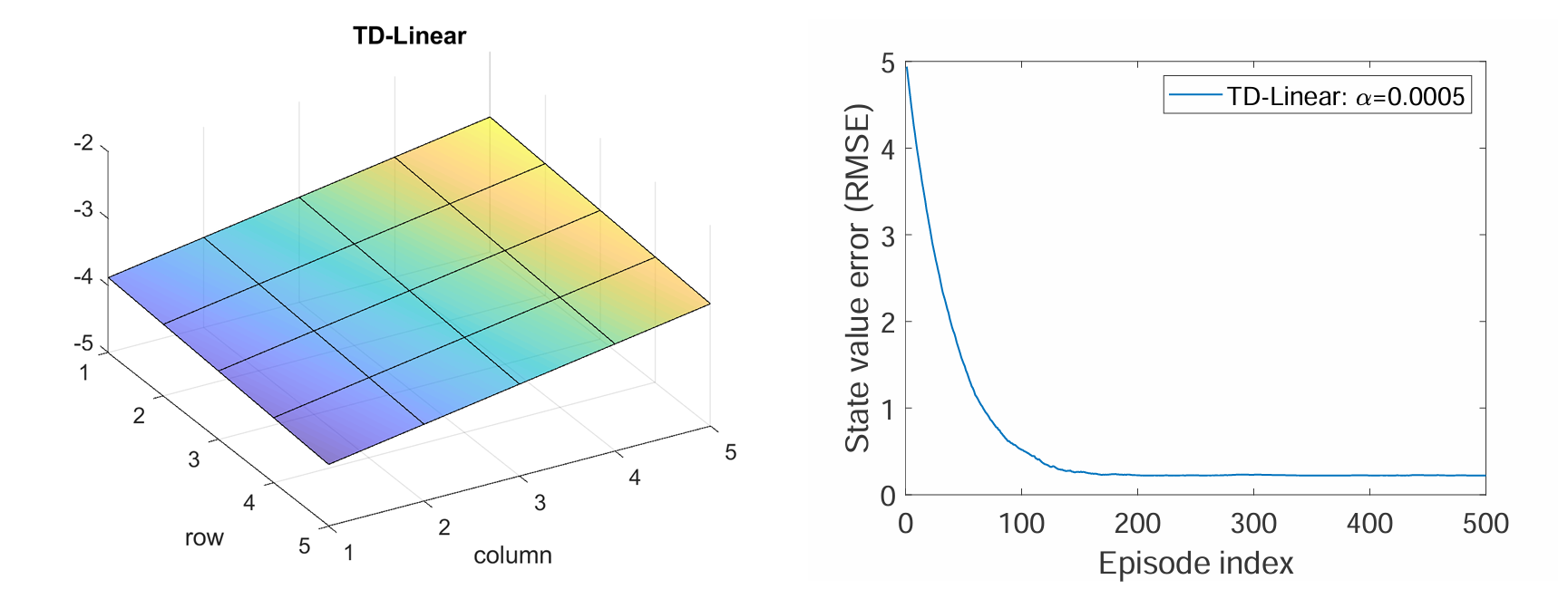
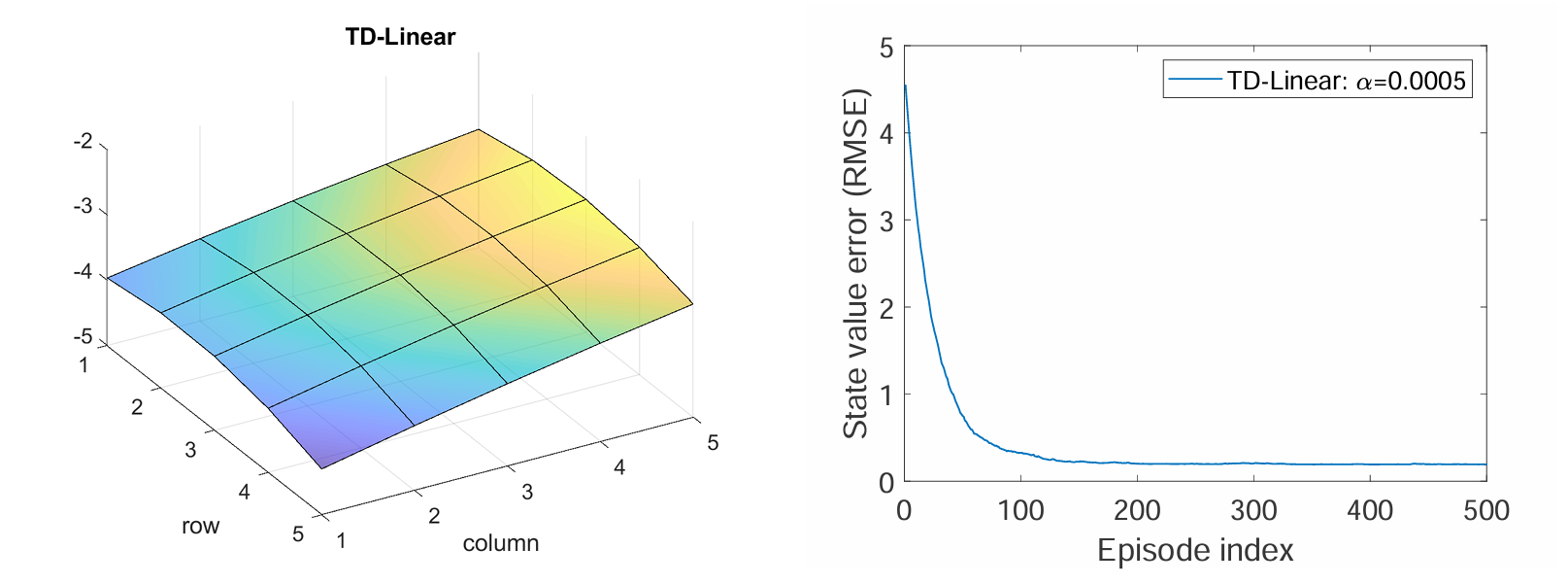
is the feature vector,它可以是 polynomial basis,可以是 Fourier basis ... 总之可选项很多。此时 代入前面提到的 TD 版的 Gradient Descent 后,就能得到所谓的 TD-Linear 算法
而 feature vector
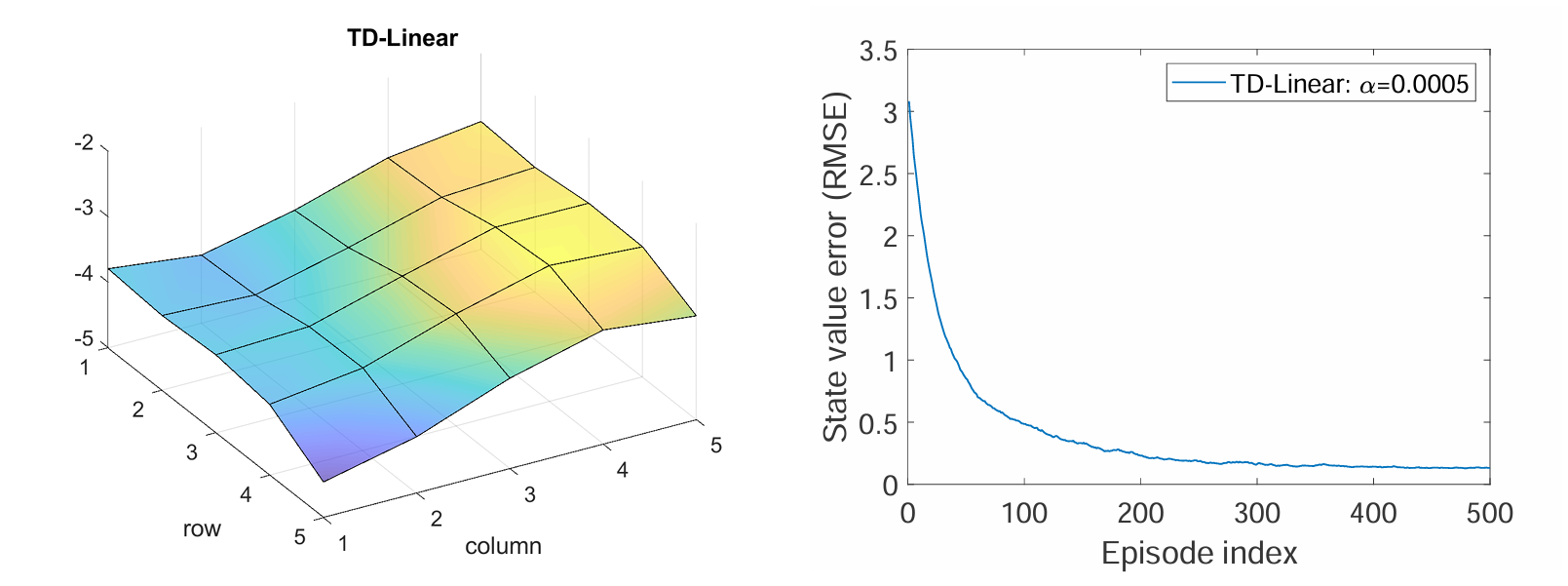
的选择会在很大程度上影响 TD-Linear 的效果 不如说 function approximator 的结构 会对最终近似的效果产生影响
就像 Linear Function 的结构决定了它的近似上限永远不会比 Neural Network 高
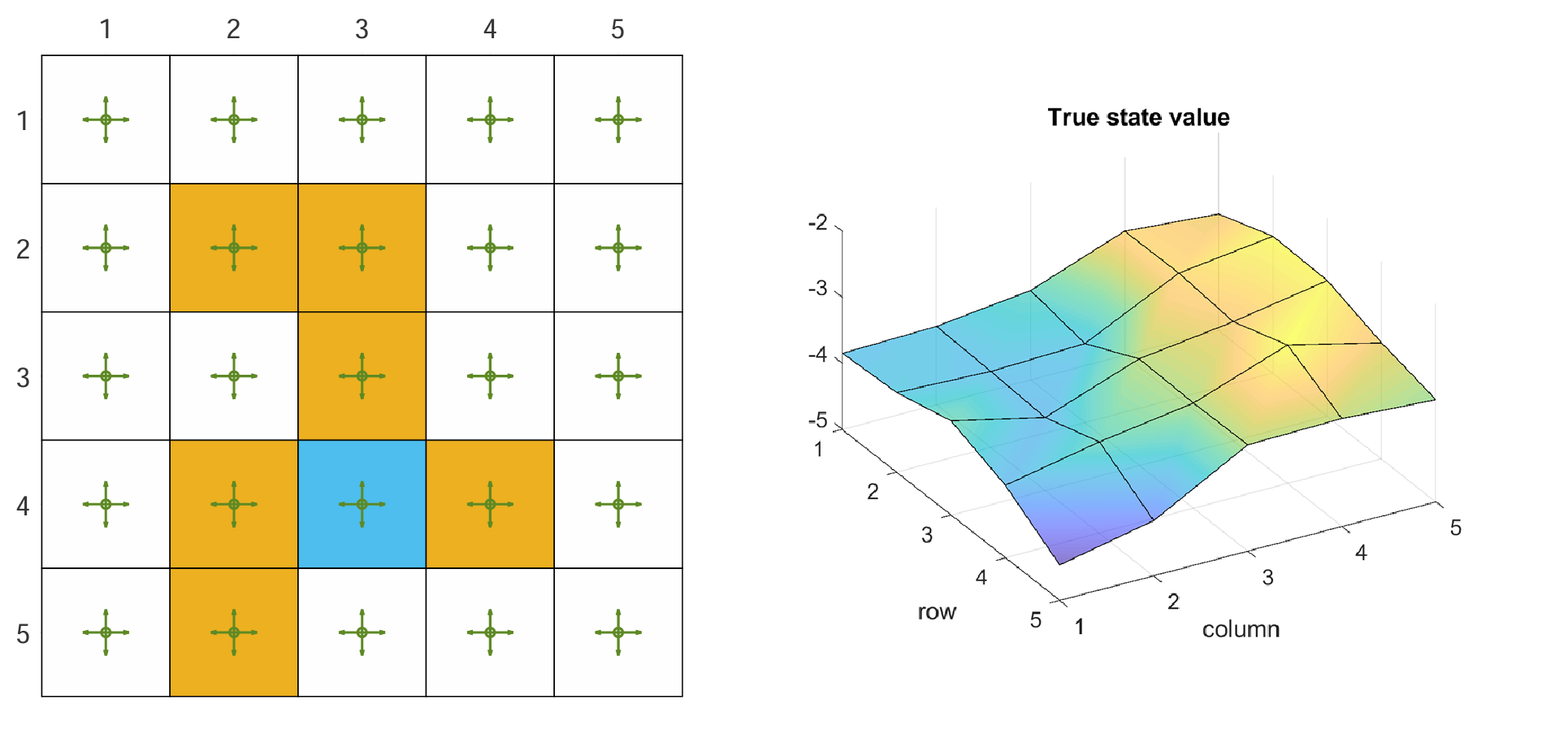
假设要 evaluate 如下的 Policy:25 个 state,5 个 action,每个 action 的概率都是0.2
Feature Vector Selection [1]:
the approximated state Value is
效果为
Feature Vector Selection [2]:
the approximated state Value is
效果为
Feature Vector Selection [3]:
the approximated state Value is
效果为
2. Action Value Estimation
- 一般意义上的 Function Approximation for Action Value Estimation
- 以 Temporal Difference 的两个对应算法为基础
- 可以 search for optimal policy
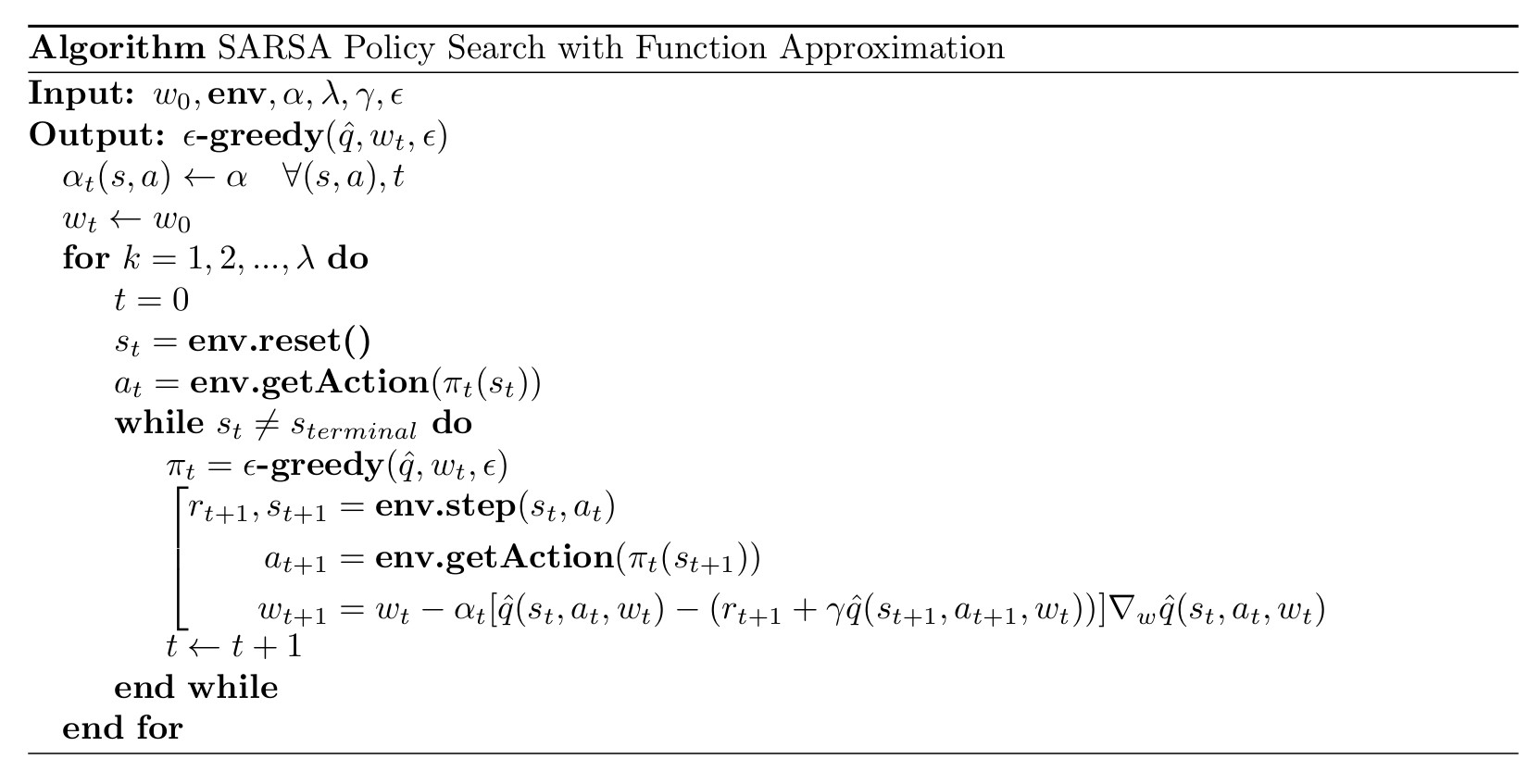
2.1 Sarsa
Sarsa with value function approximation,estimate action value
原理和前文 TD 版的 state value estimation 是差不多的,无非就是把 state value
以下是 pseudo code
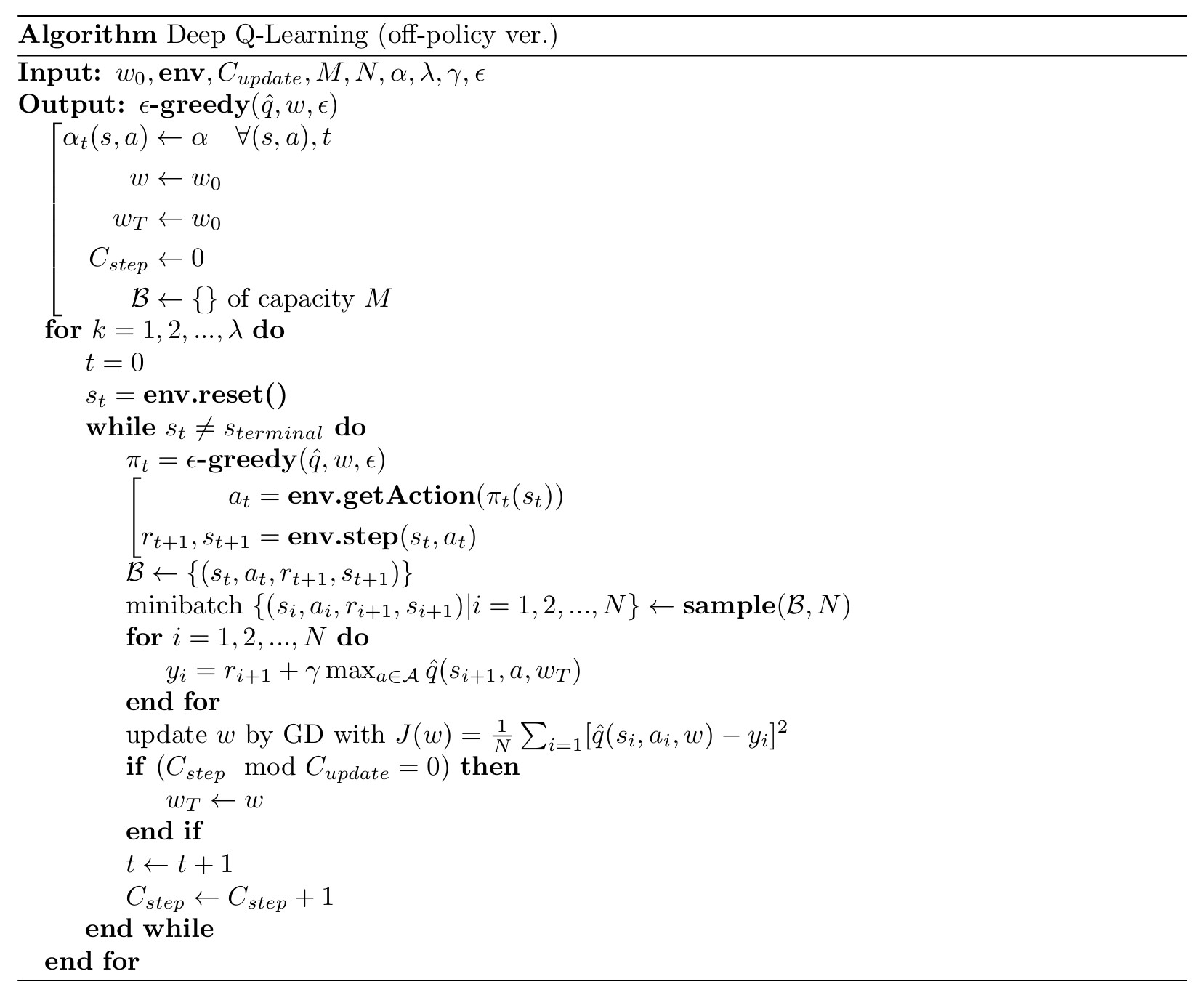
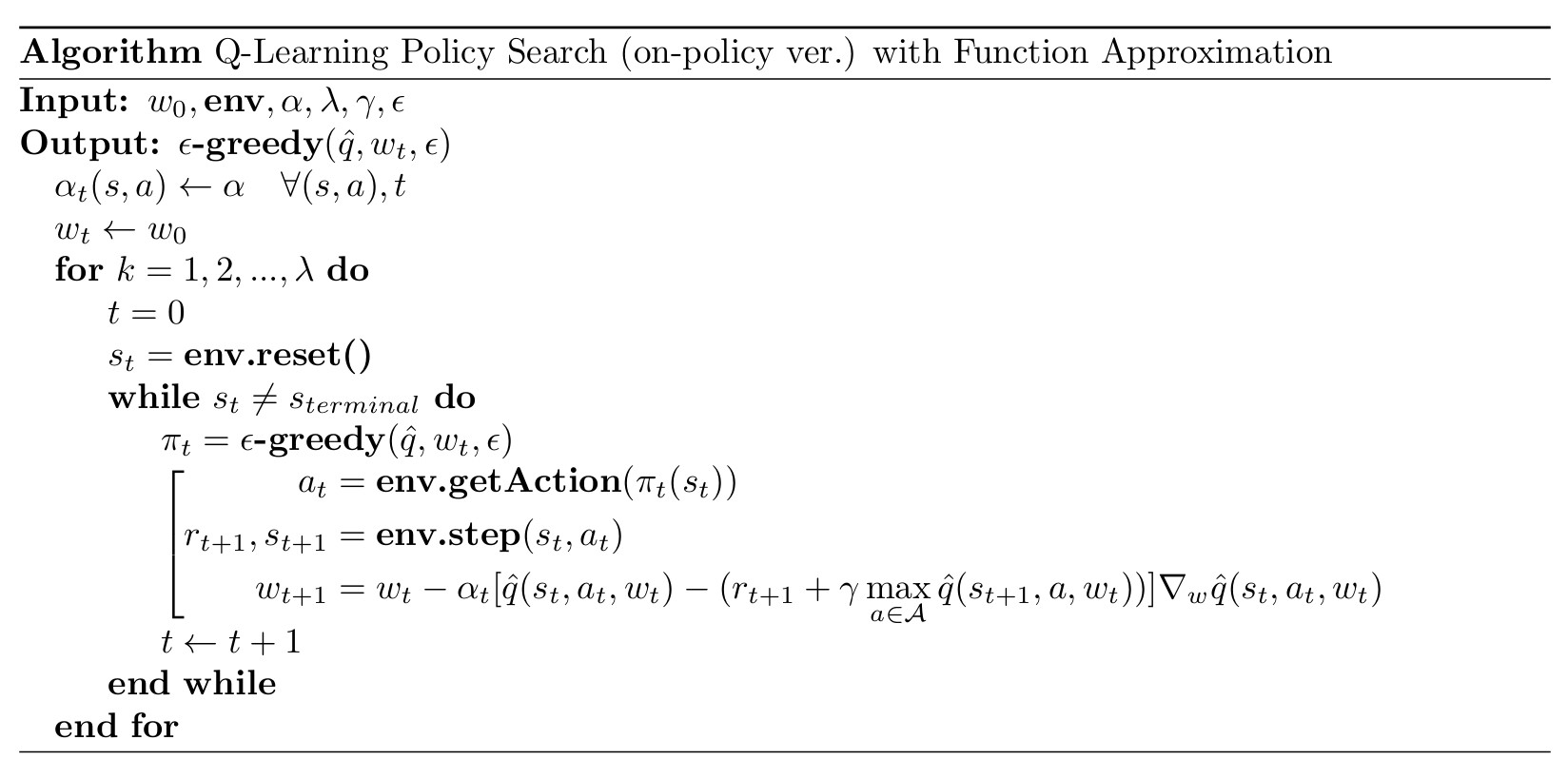
2.2 Q-Learning
Q-Learning with value function approximation,estimate optimal action value
和 Sarsa 版的区别是 TD Target 的
以下是 pseudo code
3. Deep Q-Network (DQN)
Deep Q-Learning / Deep Q-Network 是最早最成功地把 Deep Neural Network 引入 RL 的方法
3.1 Objective Function
Recall that Q-Learning aims to solve the Bellman Optimality Equation
但这个 objective function 是不能直接拿来用的,因为如果此时对
这样会搞得 network 在训练中很难收敛,所以需要分离它们
- Main Network
- Target Network
让 objective function 变成下面这样
此时 objective function 的 gradient 为
这样就可以暂时固定 target network 用来产生 experience,先更新 main network,等到两者够接近的时候再更新 target network,然后重复这个过程
3.2 Experience Replay
After we collect some experience samples, we DO NOT use them in the order they were collected
相对的,我们会用一种叫 Experience Replay 经验回放 的技巧:把收集到的 experience sample 存入 Replay Buffer
为什么需要 Experience Replay 和 uniform 采样?
- 很多 NN 的 optimizer 的算法都会假设数据是 Independently and Identically Distributed;而 experience samples 是通过某种 policy 生成出来的,明显不是 uniformly collected,所以这种做法能打破在时间上连续的 sample 之间的 correlation
- 同一个 sample 可以被复用,能提高 data efficiency 并防止灾难性遗忘
为什么一般的 (Tabular) Q-Learning 不需要?
Q-Learning 是局部更新,只是在 solve
for all DQN 是全局更新,
涉及了 ,如果为了 算出的 更改了 ,那么此时用 算出来的 也会变 不止 DQN,更准确地说,是涉及了 function approximation 的 Q-Learning,都是通过
进行全局更新 的确可以给 Q-Learning 加上 replay buffer 来让它变得更加 data efficient
3.3 Pseudo-Code