Algorithm Characteristics
- Model-Free
- Value-Based
- Incremental
- Tabular Representation
在 Model-Free 的情况下,用 Experience 求解 Bellman Expectation Equation
所以 TD 的思想与 Stochastic Gradient Descent (SGD) 非常相近,算是某种 Stochastic Approximation Algorithm
1. TD(0)
TD Learning of State Value,是最最最基本的用于 Policy Evaluation 的 TD 算法
- 只能估计 State Value of a Given Policy
- 不能估计 Action Value
- 不能搜索 Optimal Policy
1.1 Problem Formulation
Given
Policy
Experience Samples generated by
in the form
Task
Estimate State Values
under
1.2 Algorithm
核心机制类似于 Stochastic Gradient Descent
where
The visited State at Time Step Estimation of State Value Learning Rate depending on at Time Step (a small positive number)
1.2.1 关于第一个公式
TD Target
where
当前通过 的 Transition 得到的 Reward Discount Rate State Value Estimation of at Time Step 与 的意义是不同的!!! - 前者是在 Time Step
,对下一个 Time Step 可能抵达的 State 进行的 State Value Estimation! - 后者是在下一个 Time Step
,对当前 Time Step 所 access 的 State 进行的 State Value Estimation!
- 前者是在 Time Step
TD Target
是利用当前的 Experience Sample 对 的单步估计样本 将其与 Bellman Expectation Equation 对比有助于理解其含义
State Value 定义式
Discounted Return
是 State Value 的 Expectation State Value 递推式
这也是 BEE 的一种形式!(但不是 Matrix-Vector Form)(名字是我自己取的,这不重要)
TD Target
Discounted Return 公式展开是
公式结构的相似性说明,TD Target 类似是对 Discounted Return 的一次采样
由于 Discounted Return 是 State Value 的 Expectation,所以 TD Target 成为与
作差的对象就非常合理咯
TD Error
Intuition
结合前文探讨的 TD Target 意义去看下面的这个改写公式,这个 TD Error 的写法是非常合理的
It drives
towards 由于
是一个 small positive number,所以有 所以
且
所以每次 Time Step 更新,
一定会离 更近! A Measure of the Deficiency between
and 假设此时
,则 由于 TD Target 中提到的
所以有
即,当 TD Error
时,
1.2.2 关于第二个公式
对于所有在当前 Time Step 未被 access 的 State,其对应的 State Value 估计值不变
THAND GOD! 解释这个比上面那个烦人的公式方便多了...
1.3 Algorithm Derivation
这个算法的本质是用 Special Topics 里的 Robbins-Monro Algorithm 来解一个诡异的 BEE 的表达式
BEE 的 State Value 递推式
即 1.2.1 中提到的
RM Problem Formulation
RM Algorithm
where
is the current state at Step , is the next state transitioned to after an action 做如下两个修改,以适应 RL 语境
- 前者为 RM Algorithm 用到的一组样本,运算过程中需要不断采样,而它们都是独立采样的,有 independent & identically distributed 这一假设
- 但是显然做 RL 的时候你肯定没那个心情去一组一组采,TD 依赖的是 Experience Samples (see 1.1) ("Trajectory"),而只有后者的形式才能表示一条 Trajectory
我们不可能预先知道
,所以只能用 ,即其 Estimation 来代替 这种替换仍然能确保
收敛
最后变成
然后,由于
和 实际上是同一个东西 在这个部分描述的算法中 depends on
所以...Voila~
1.4 Convergence
Theorem
By the algorithm introduced in the above sections:
Given Policy
, if and for all Then, it is almost for sure that
as for all 关于 Learning Rate
实操中
一般是一个 small constant(哪怕这会导致不满足 ) 因为如果放任
越来越小,到很久很久以后 Experience Samples 就会因为 Learning Rate 过小而失去作用
2. Sarsa
TD Learning of Action Values,功能为 Policy Evaluation
可以估计 Action Value
可以搜索 Optimal Policy
因为它终于开始涉及 Action 了,能评估不同 Action 的效果(求 Action Value),就能设法用
-Greedy 的方式去选出合适的 Action 来更新 Policy
2.1 Problem Formulation
Given
Policy
Experience Samples generated by
in the form State, Action, Reward, State, Action = SARSA
Task
Estimate Action Values
under
2.2 Sarsa
相当于 Action Value 版本的 TD(0)
Mathematical Objective
a stochastic approximation algorithm solving
这是一种 BEE 用 Action Value 表达的写法
Algorithm
每次 Update Action Value 需要的 Experience 为一组
where
The visited State at Time Step The selected Action at Time Step Estimation of Action Value , or "Q-Table" Learning Rate depending on at Time Step (a small positive number)
Pseudo-Code
In general, we maintain a Q-Table
outside the episodes -Greedy Update 方式此处不细讲了,在某 State 选择 Action 的条件是 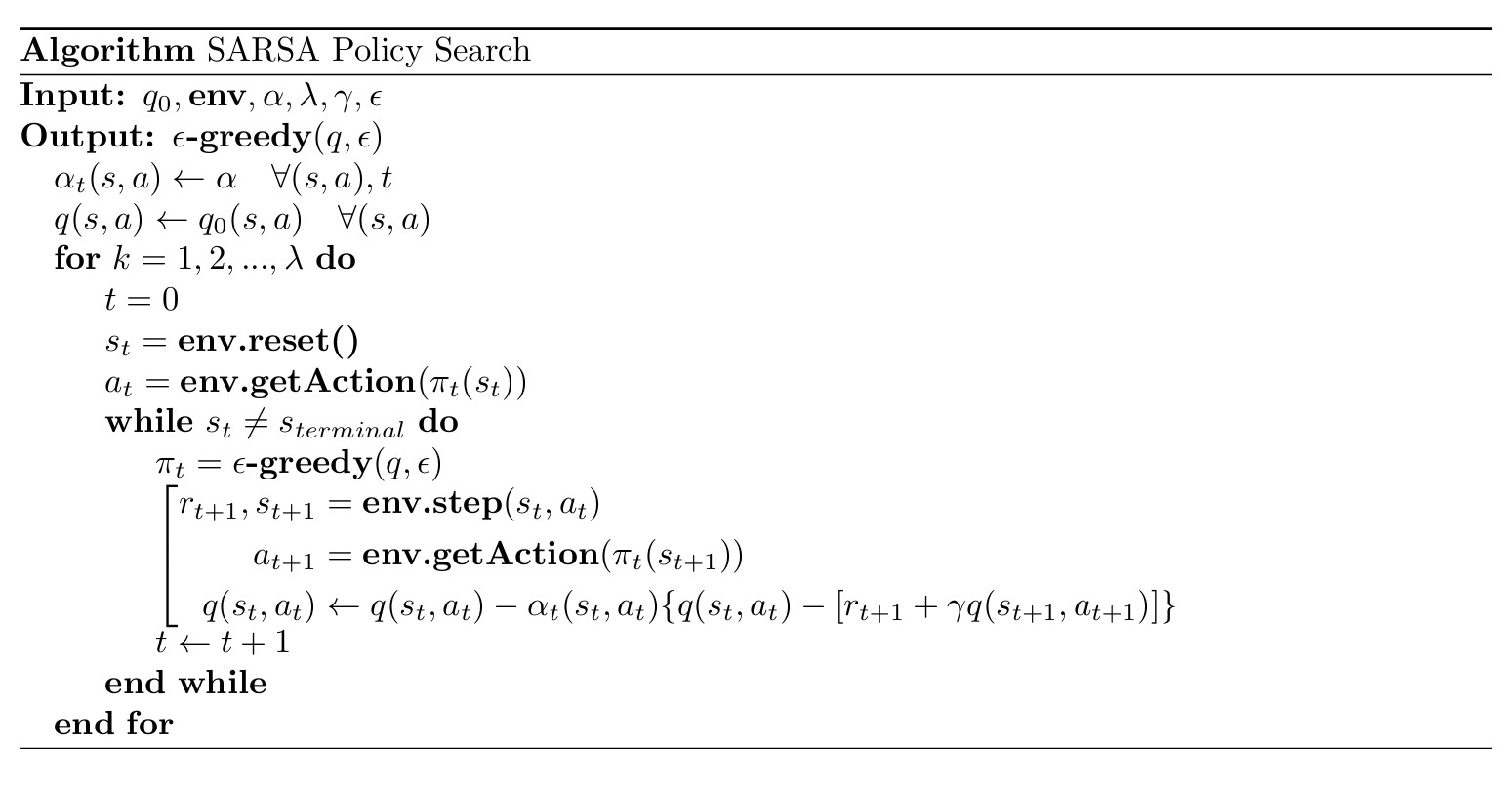
2.3 Expected Sarsa
与一般版本的 Sarsa 的区别在于 TD Target 稍微变了一下
这样能将每组 Experience 涉及的 Random Variable 减少
Matwhematical Objective
a stochastic approximation algorithm solving
这是也一种 BEE 用 Action Value 表达的写法
Algorithm
每次 Update Action Value 需要的 Experience 为一组
Notes
- Needs more computation
- 由于减少了涉及的 Random Variable,所以能 reduce estimation variances
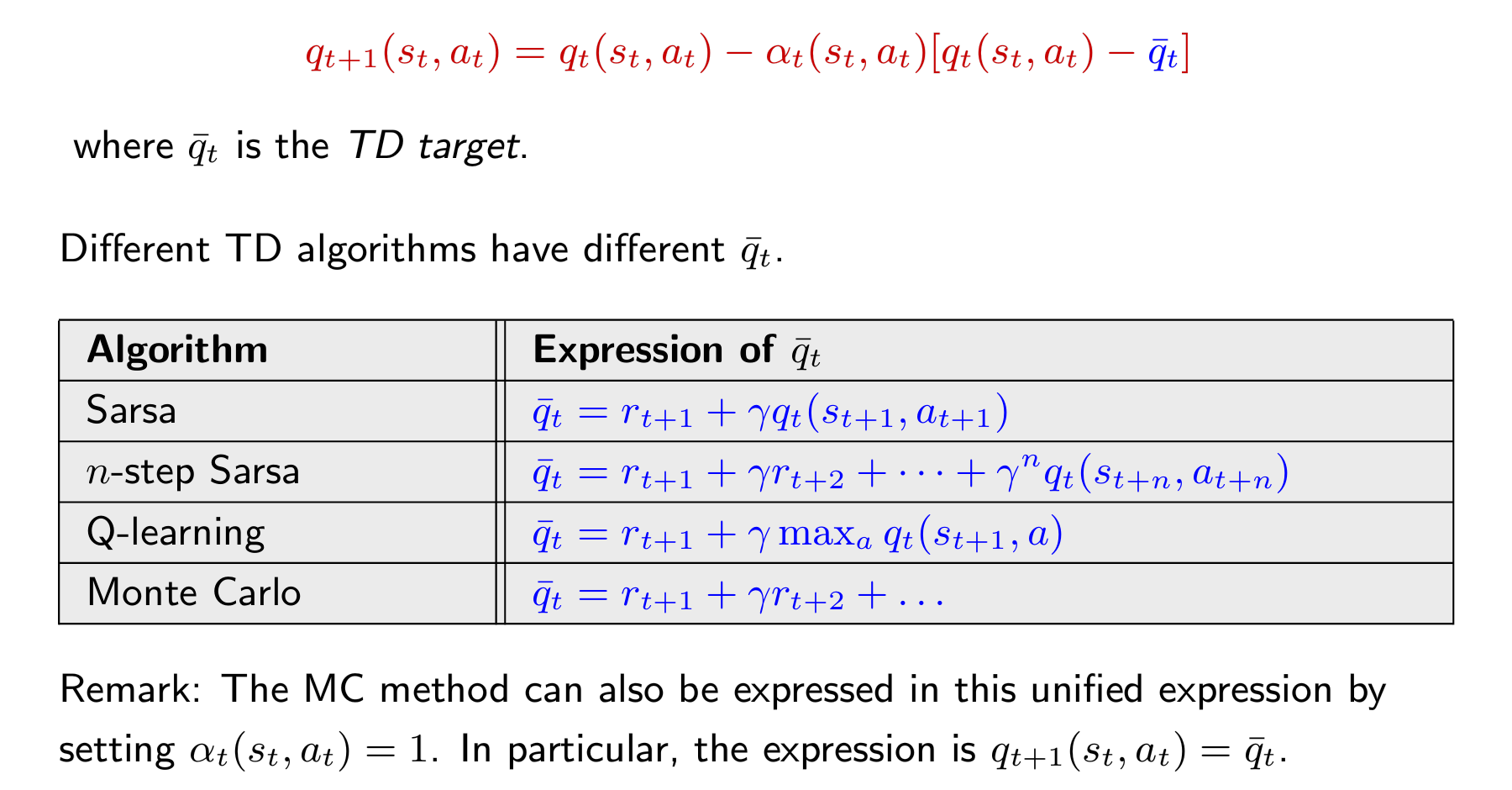
2.4 n-Step Sarsa
这是个介于 2.2 的一般 Sarsa 和 Monte-Carlo 之间的算法,关键在 Action Value 的公式上
Intuition
Discounted Return
can be written in different form as [ WARNING ]
请千万记住,以上只是 written in different forms!
所有的 superscript 都只是用于表示
的分解程度 Mathematical Objective
Sarsa
It aims to solve
Monte-Carlo
It aims to solve
n-Step Sarsa
It aims to solve
- n-Step Sarsa = Sarsa, when
- n-Step Sarsa = Monte-Carlo, when
- n-Step Sarsa = Sarsa, when
Algorithm
每次 Update Action Value 需要的 Experience 为一组
We need to wait until Time Step
to update Action Value of Notes
Performance is a blend of Sarsa and Monte-Carlo
- if n is large, then it has a large variance but a small bias
- if n is small, then it has a large bias but a small variance
3. Q-Learning
TD Learning of Optimal Action Values
和 Sarsa 很像,但 TD Target 以及做 Policy Improvement 时所用方法的区别非常大
3.1 Algorithm
Mathematical Objective
It aims to solve
This is a BOE instead of BEE expressed in terms of Action Values!
所以 Q-Learning 能直接 estimate (optimal policy 对应的) optimal action value
Algorithm
每次 Update Action Value 需要的 Experience 为一组
不需要
的原因是,它应该是通过 得到的 Notes
Q-Learning 有 (类) On-Policy 和 Off-Policy 两种版本
3.2 On-Policy Ver. Pseudo-Code
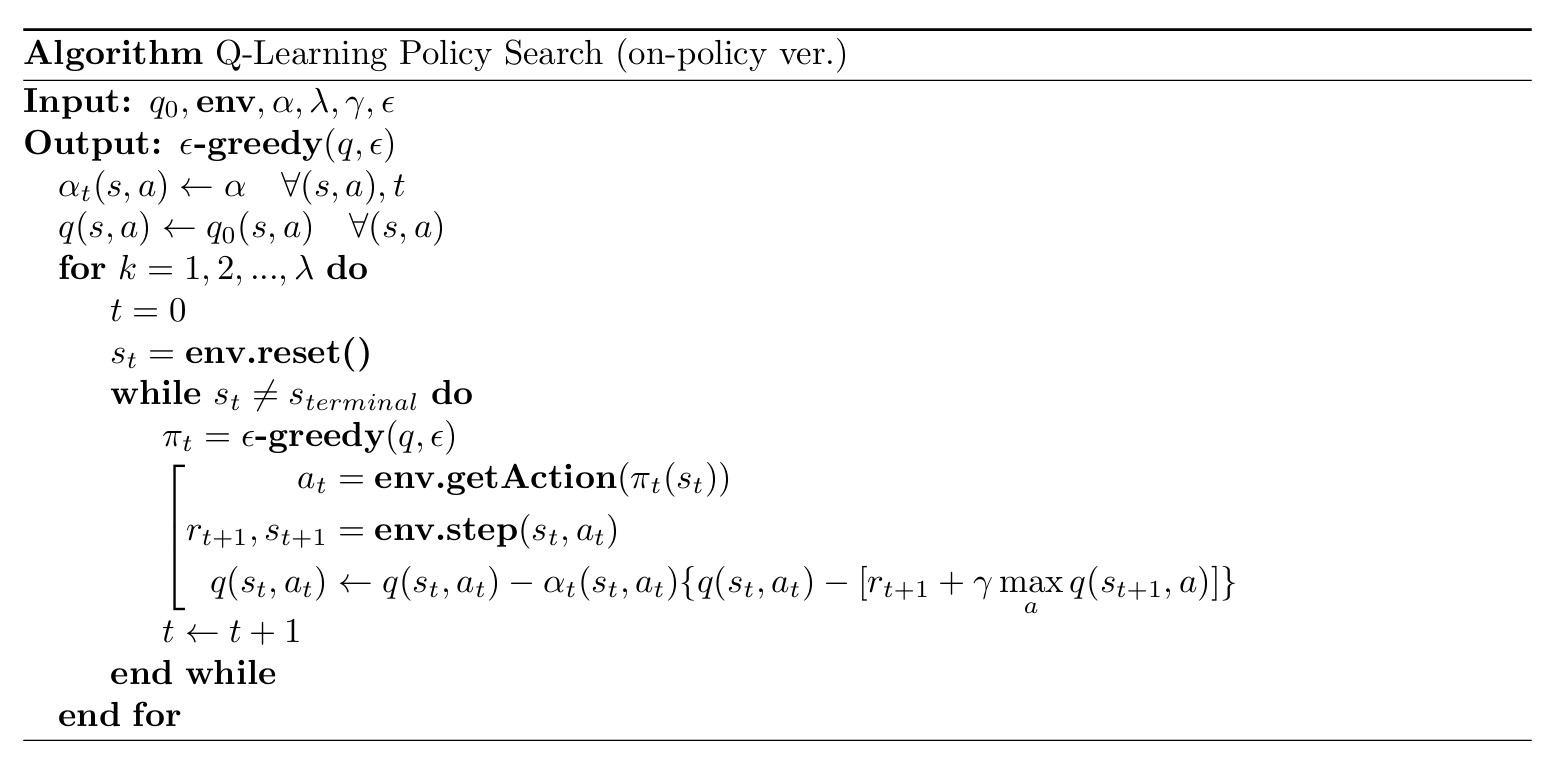
请注意它本质上是类似 on-policy
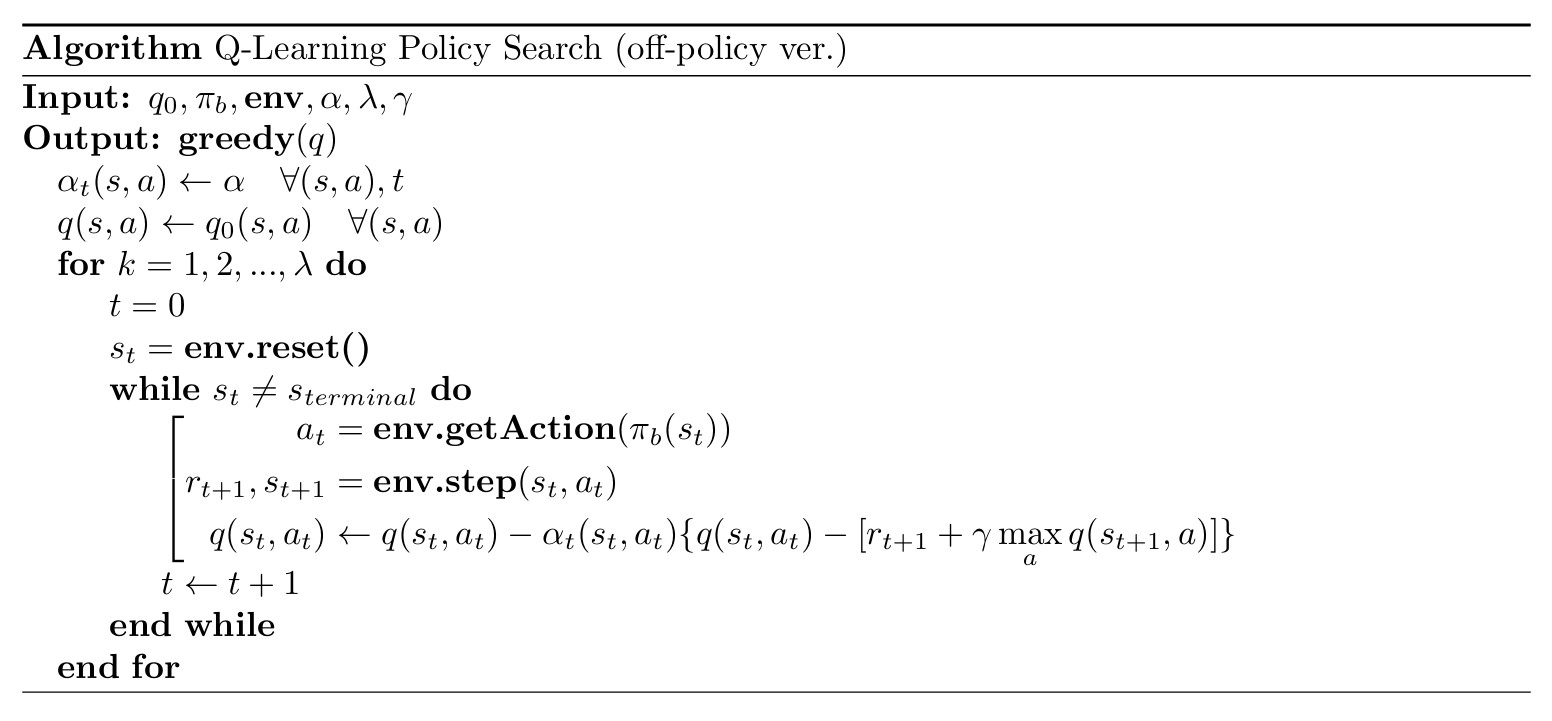
3.3 Off-Policy Ver. Pseudo-Code
请注意,Off-Policy Learning 的算法在 Update Policy 时不需要考虑 Target Policy
所以在 Update Target Policy 的时候,可以舍弃
对于某个 State
,Greedy Update 的方式为 ?1:0
以下为 Pseudo Code
[ Notes ] Universal Expression
Algorithm
Mathematical Objective

[ Notes ] On/Off-Policy Learning
Temporal-Difference Learning 的算法涉及 Generate Experience 和 Optimize Policy 两件事
- Behavior Policy is used to Generate Experience Samples
- Target Policy is constantly updated towards Optimal Policy
所谓 On-Policy 与 Off-Policy 的区别便在于这两种 Policy 是否一致
On-Policy Learning
Behavior Policy Target Policy Policy 先被用来 Generate Experience,然后 Optimize,这两个步骤不断循环
Off-Policy Learning
Behavior Policy Target Policy Policy A 专门用来 Generate Experience,用来 Optimize Policy B
比如 Sarsa 和 Monte-Carlo 都是 On-Policy,Q-Learning 一般是 Off-Policy 的,但也可以被 implement 成类似 On-Policy 的形式
Special Topics - Robbins-Monro
这个 RM Algorithm 是 Temporal Difference Method 的基础
1. Algorithm
一种用于 Stochastic Approximation 的算法
Problem Formulation
很多问题都能写成这种形式:find the Root
of equation that satisfies 解的时候有两种情况:
Model-Based
即已知
是什么,那么就会有各种 Numerical Method 任君挑选 Model-Free
即未知
是什么,那么就用 Robbins-Monro (RM) Algorithm 来解
Algorithm
where
estimation of root 某 Positive Coefficient 观测时的 Noise,不理解可见 3.1 的例子 Noisy Observation
还是那句话:没 Model 就得有 Data,没 Data 就得有 Model
Example
Assume parameters
即假设没有 Noise,
则 RM Algorithm 为
迭代效果如下图
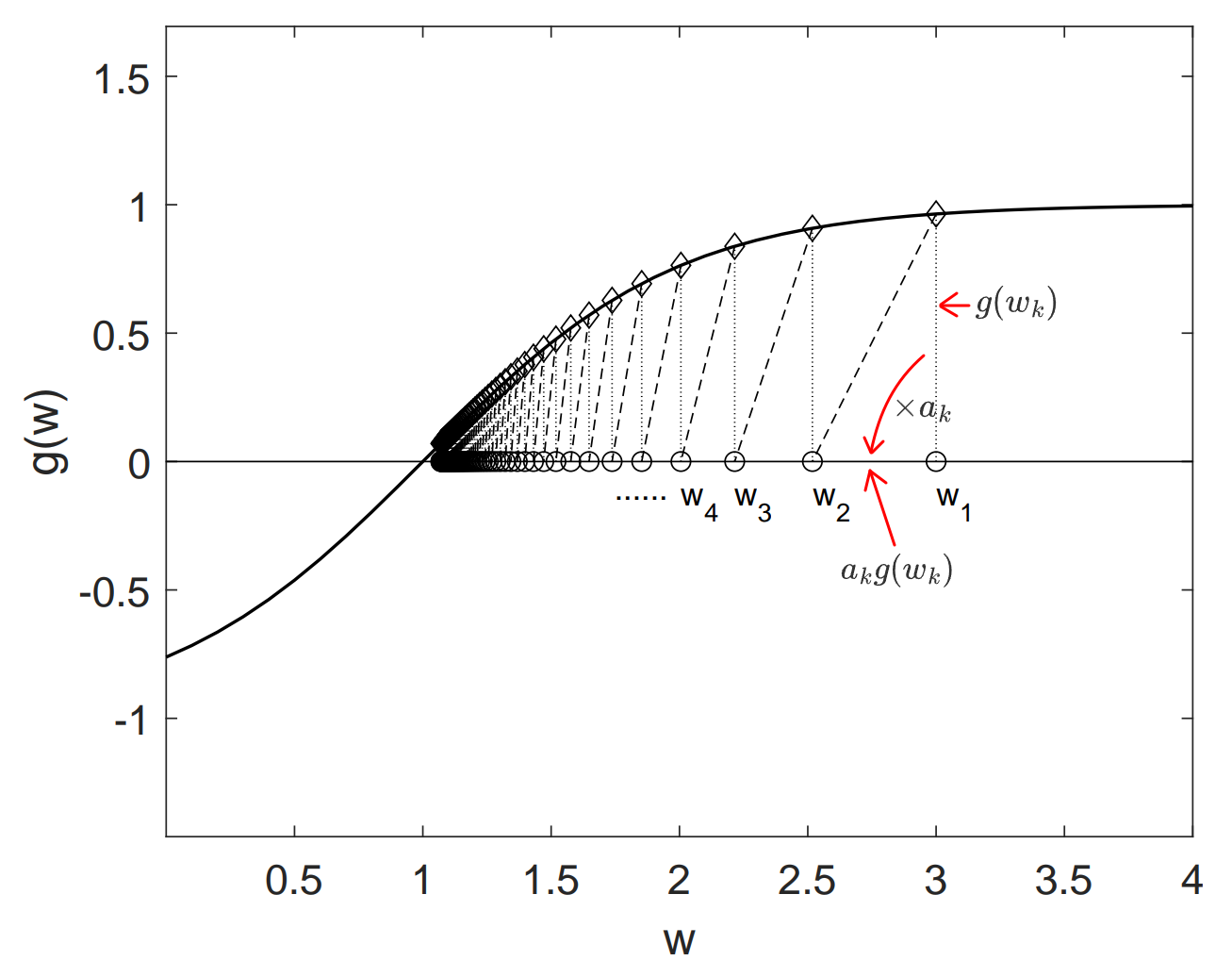
实际上无论初始值的正负如何,最后总是能迭代收敛到 True Root
2. Convergence Theorem
In RM Algorithm, if
即
的图像始终递增且梯度有界,这样能确保一定有 and 后者确保 "
as ",前者确保 " 不会收敛得太快" and where 前者表示 "
的 mean 为 0",后者表示 " 有界",noise 不一定非要是 Gaussian
then
“with probability 1” 表示的是概率意义上的收敛,因为涉及随机变量采样
3. More Examples
走过路过,不要错过!Mean Estimation!
3.1 嗯...
Solve for
Reformulate the problem to
得到的 Samples
where the Noise is
那么 RM Algorithm Formulation 为
3.2 哦吼吼~
增加点难度~
Solve for
Reformulate the problem to
得到的 Samples
where the Noise is
那么 RM Algorithm Formulation 为
3.3 《 你 好 》
再加点佐料~
Solve for
Reformulate the problem to
得到的 Samples
where the Noise is
那么 RM Algorithm Formulation 为