1. Epipolar Basics
1.1 Setup
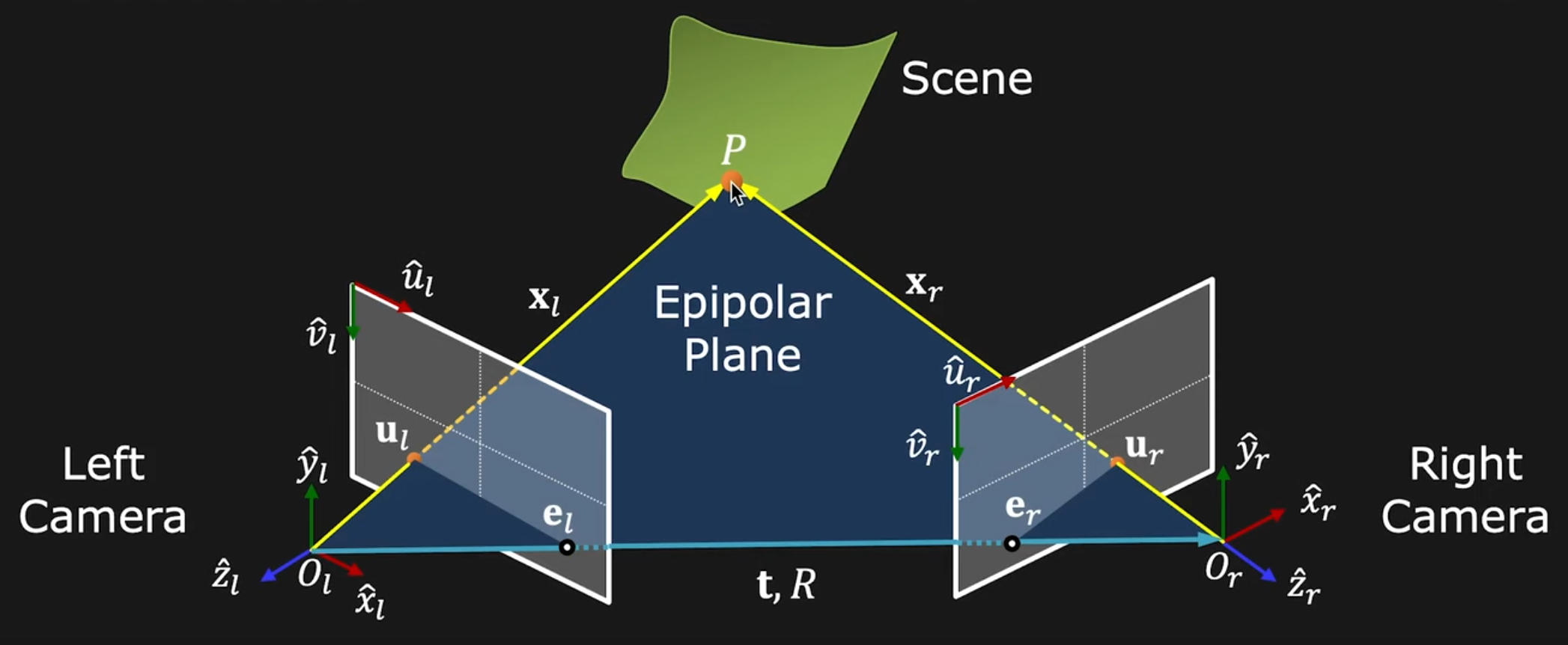
上图是经典的 Epipolar Geometry 极几何 的设置
左右两相机的光心 / 原点 Epipoles,Image Point of camera origin as viewed by the other camera - 人话:
是右侧相机在左侧 Image Plane 上的投影, 同理 - They are unique for a given stereo pair
- 人话:
Scene Point,拍摄场景上的一点,每个场景点都有唯一对应的 Epipolar Plane Translation & Rotation Coordinates (Matrix) of in Scene Point 分别在左右相机坐标系下的空间坐标
1.2 Epipolar Constraint
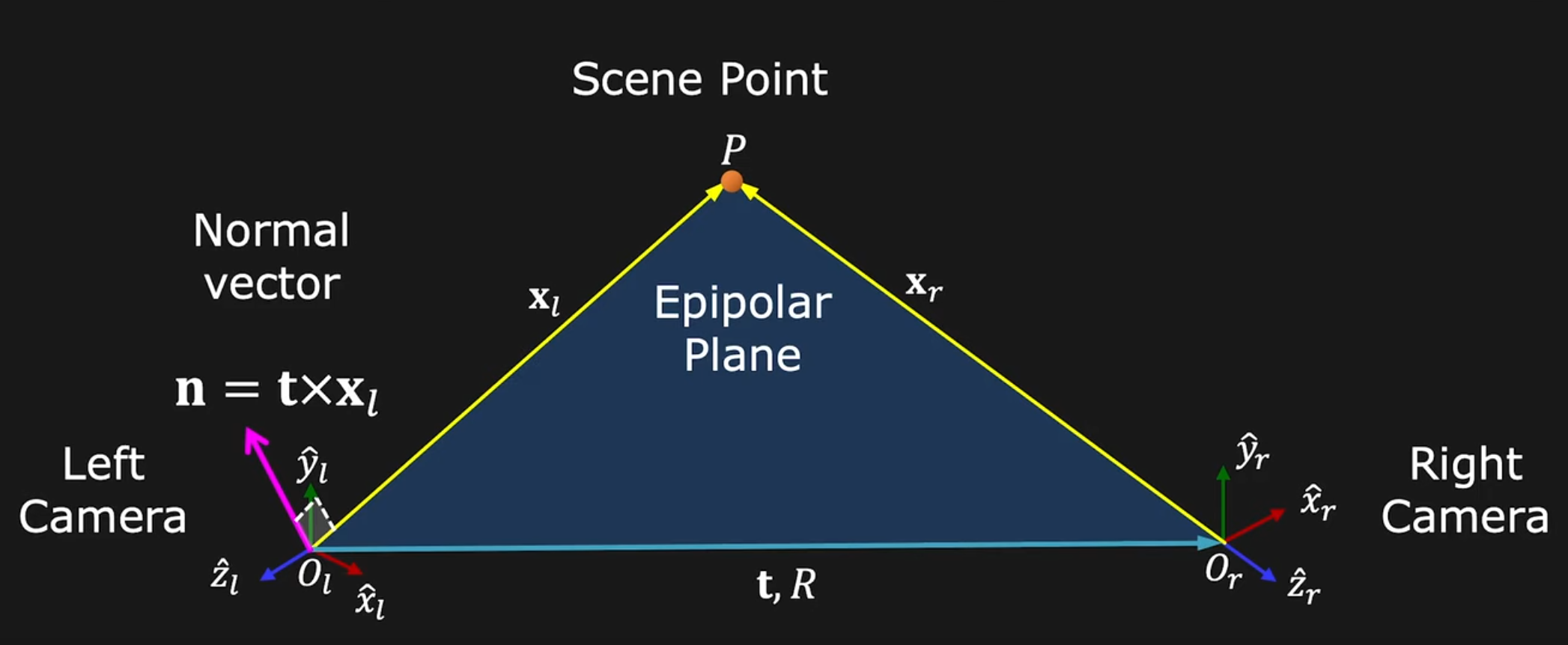
这个 constraint 的核心是:Scene Point
图中的
Epipolar Constraint 即
1.3 Essential Matrix
Essential Matrix 是关联 两个相机坐标系下 Scene Point 三维坐标 的工具
预处理 1
Assume
is in the form Express the Epipolar Constraint in matrix form
自己查 matrix cross product 就知道为什么这么写了
预处理 2
Assume
is in the form 和 可以通过 建立联系
将公式 (2) 代入公式 (1) 可得
由于向量对自己叉乘结果为0,所以有
中间两个矩阵合并得到 Essential Matrix
In summary
Tip. 只要你知道了
,就能通过 SVD 拆出 和
1.4 Fundamental Matrix
Fundamental Matrix 是关联 两个相机 Image Plane 中 Scene Point 投影坐标 的工具
Scene Point
请原谅,齐次坐标有些别扭
假设两台相机的 Intrinsic Matrix 为
把整理好的
由于在齐次坐标的意义确保了
合并后得到
In Summary
1.6 Model Summary
Essential Matrix 展开
For Calibrated Cameras
Fundamental Matrix 展开
For Uncalibrated Camera
此处由于去掉了
,若使用 还原 再还原 便会出现尺度丢失的问题 一半展开
完全展开
2. Epipolar 相关应用
2.1 相机 - 求相对位姿
求
求
但是 1.4 提供了一条用 Fundamental Matrix
在两个相机的 Image Plane 上找一打对应点
用下式求出 Fundamental Matrix
用下式求出 Essential Matrix
用 SVD 从下式中拆解出
2.2 八点法 8-Point Algorithm
八点法是用于求解 Fundamental Matrix
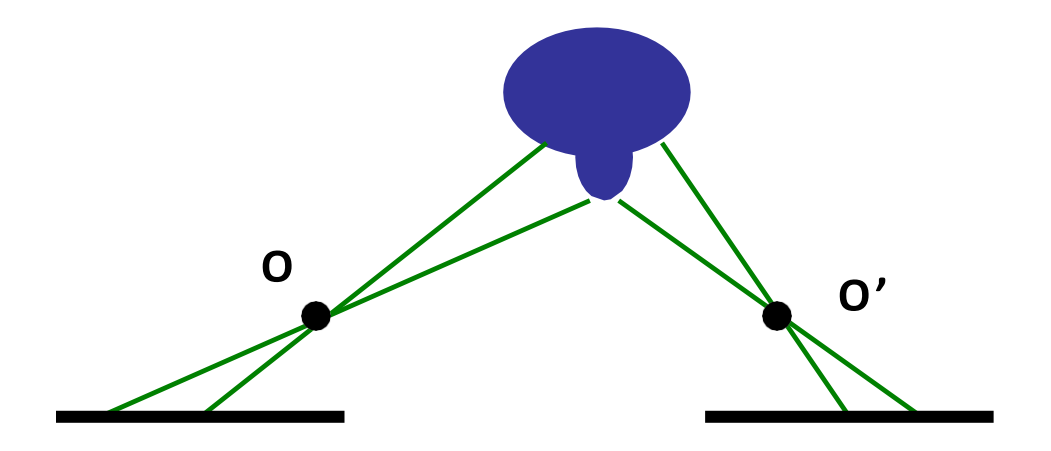
2.2.1 基本部分
理论上
如上图,八点法选取(大于)8 对特征点
然后展开整理,能得到这么个齐次线性方程组
然后求 Least-Square Solution
的 scale 无所谓,所以可以加个非常 handy 的 constraint,限定 的 magnitude 为 1
用 SVD 分解可得到一个
2.2.2 Rank Constraint
Rank Constraint of Fundamental Matrix
上一部分里通过 SVD 解得的
这意味着
see 4.
Enforce 这个 Rank Constraint 的方法很简单,对
然后令
2.2.3 八点法的缺陷
- 精度较低
中各元素差异较大 - SVD 分解有数值计算问题
2.3 Find Correspondence
在左侧相机的 Image Plane 里指定一 Scene Point
2.3.1 Method: Epipolar Line
Epipolar Line is the Intersection of Epipolar Plane and Image Planes
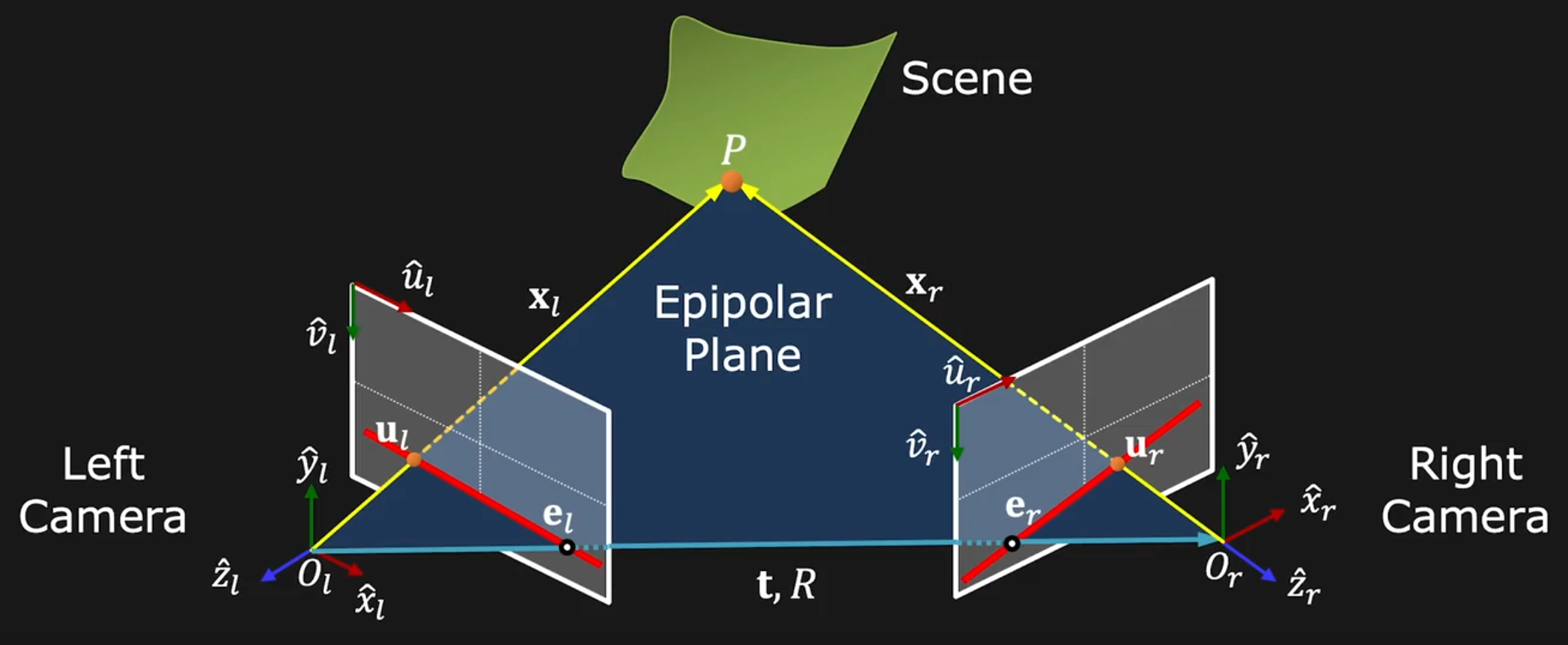
在 1.1 中有提到,每个 Scene Point
简而言之:每个
在 Epipolar 系统中都有 2条 这样的线,一个 Image Plane 一条
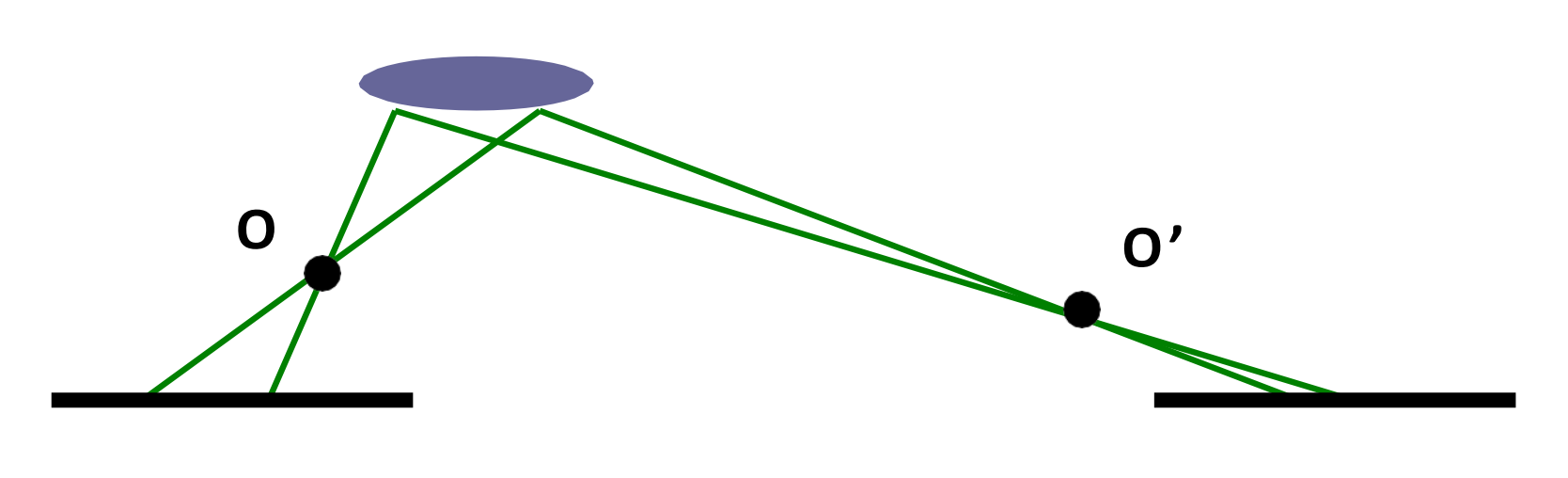
两个 Corresponding Points 一定在同一个 Epipolar Plane 上 (如下图中的虚线)
而 Epipolar Plane 一定会与 Image Plane 有一条交线
所以只要能找到右侧相机 Image Plane 里的那条 Epipolar Line,找对应点的过程就能被简化为 1D Search!
2.3.2 Find Epipolar Line
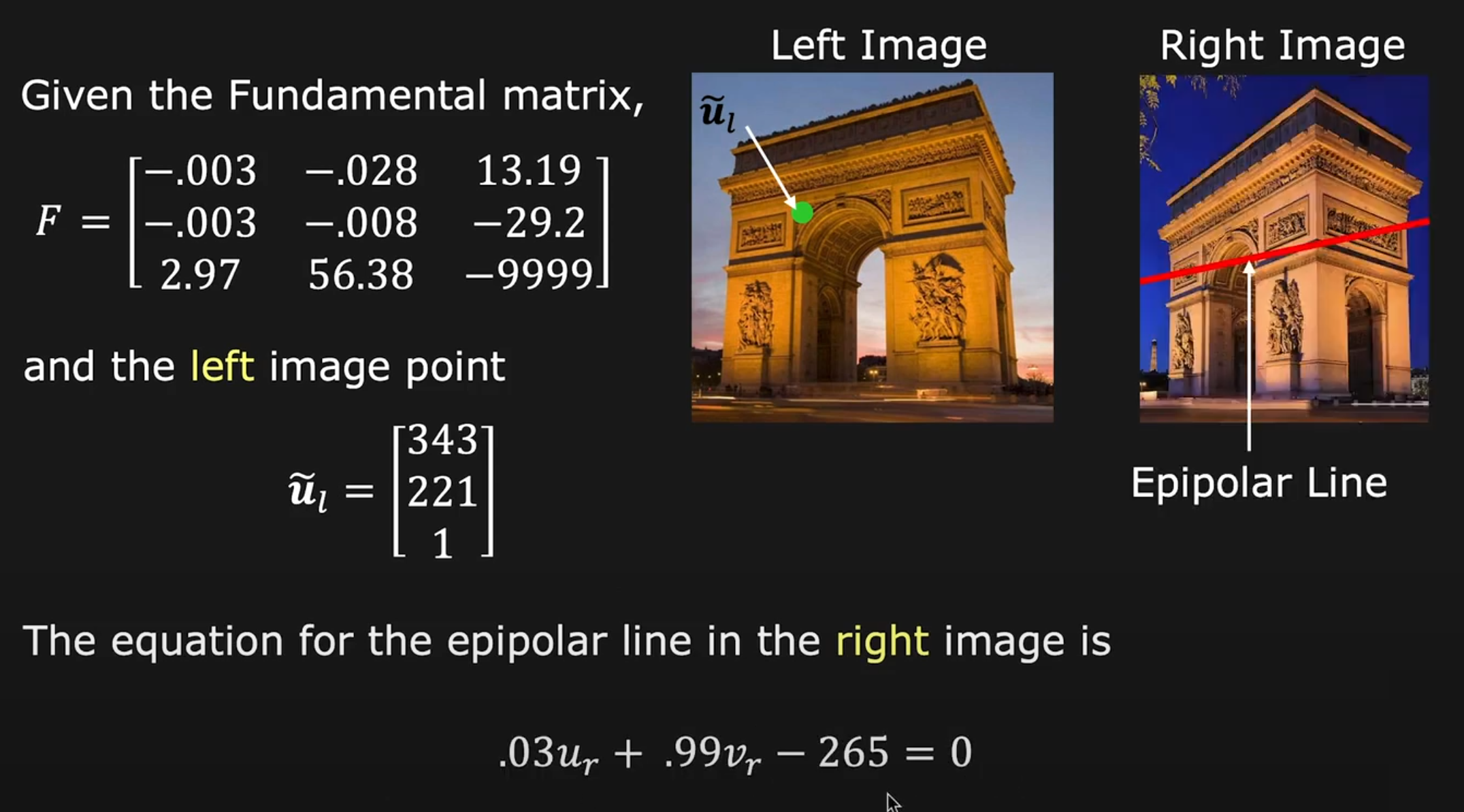
Given
- Fundamental Matrix
- Left Image 上一点
- Fundamental Matrix
方法 1:
依据 1.6 提供的公式
展开后得
由于
和 均已知,所以可以直接合并成系数,化简所得即右侧 Image Plane 上的 Epipolar Line 然后做个 1D Search 就完事了
方法 2:
参考 1.6 提供的公式
以及 “点
在线 上” 的点乘条件 对比一下可以很快得出左右 Epipolar Line 的公式
和 方法 1 的结果对比一下,一模一样!
2.3.3 Example
2.4 Find Depth
Given:
Scene Point
在两相机 Image Plane 里的投影点坐标 两台相机的 Intrinsic Matrix
两台相机的相对位置
Find:
Depth of
from the Right Camera ! 预处理 1
假定
在 和 中的三维坐标为 与在各自相机 Image Plane 上的投影点 通过 Camera Matrix 分别建立联系 预处理 2
通过描述相机相对位置的 建立联系 然后代入 预处理 1 中右侧相机的映射关系
Computation
联立预处理后的两个公式
显然
与 只差一个 scale ,对于 同理,因此有 那更进一步,如果公式两侧叉乘,就会
这样就能完全忽略归一化项
,上式展开后联立可得 最后 find least-square solution using Pseudo-Inverse 即可找出
3. Stereo
3.1 Binocular Vision Setup
这样的 Stereo System 是 Epipolar System 的特殊版本,类似于一台相机拍一张照片,然后平移一段距离,再拍一张照片
两台相机一模一样,间距为
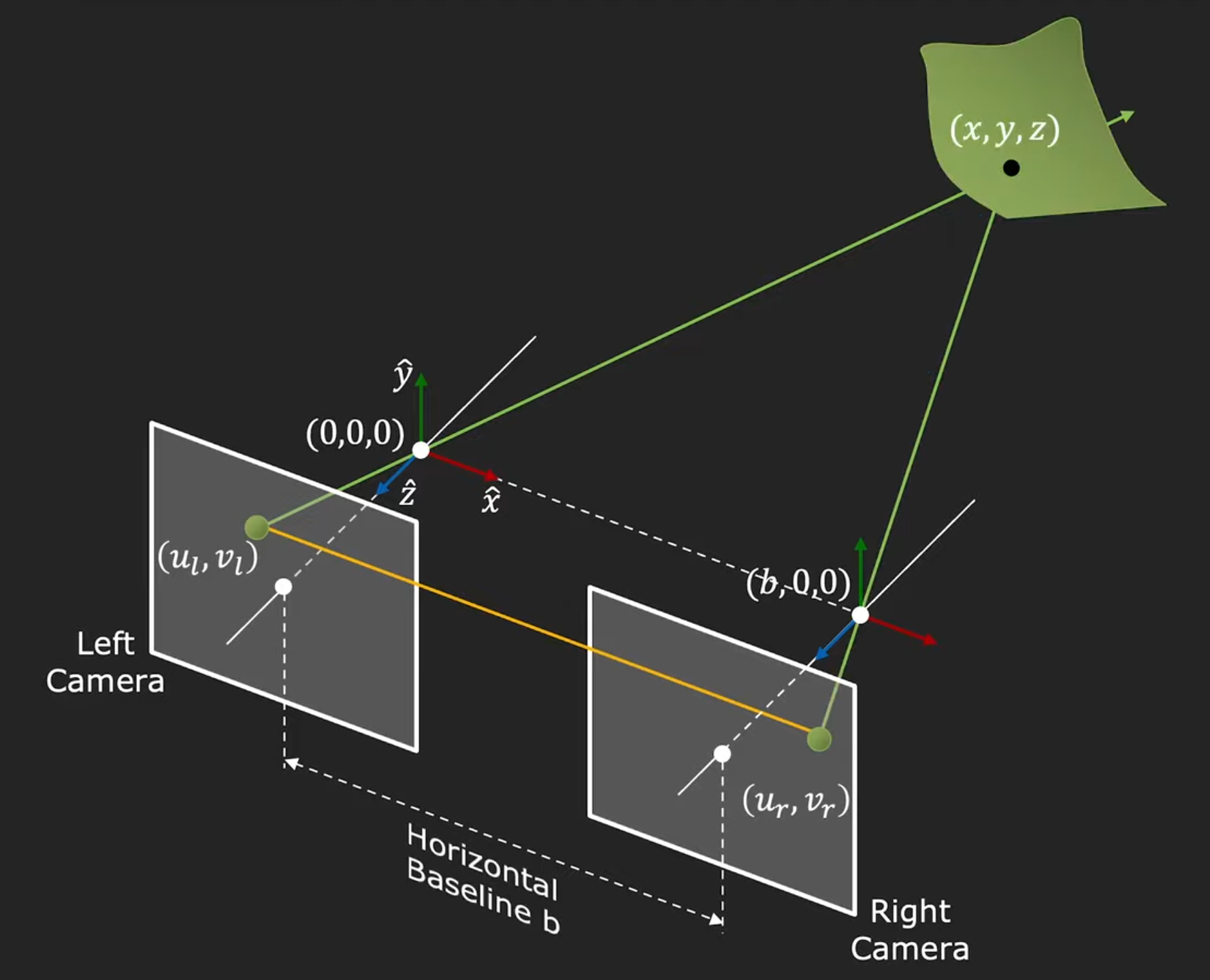
这个系统有如下特性:
Epipoles 在无穷远处,左侧相机的 Epipole 在左侧无穷远,右侧的在右侧无穷远
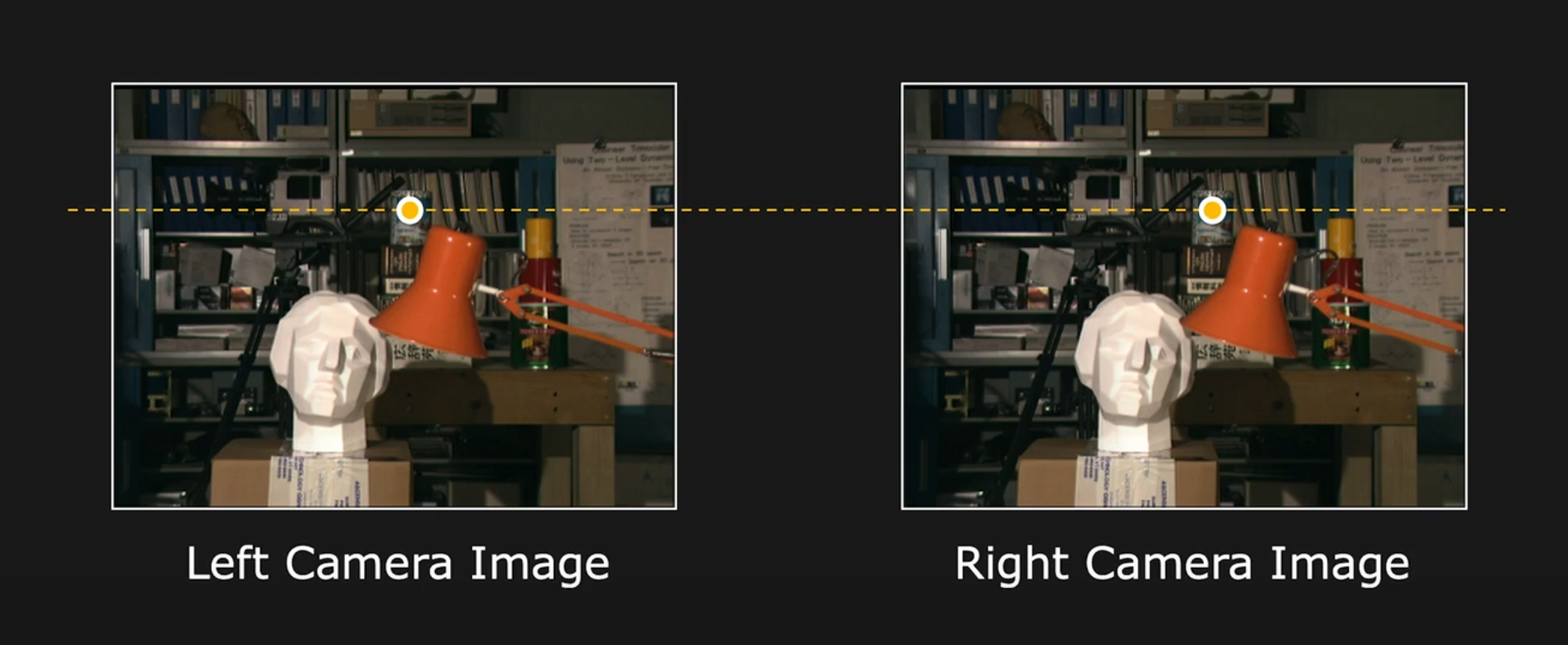
Scene Point 的 Epipolar Line 水平于 Image Plane 的
轴,如上图黄线所示 不止水平,而且重合,不过原因很简单,因为此时 Epipolar Line 是 Epipolar Plane 的组成部分之一了
Scene Point 的投影点高度相等
3.2 Triangulation
设定两台相机的 Camera Matrix 为
所以两个 Image Plane 上 Scene Point 投影点与其三维坐标的关系为
展开后分别得到
右侧投影点
左侧投影点
这里就能看出来
了
3.3 Disparity
Solve for
where
Disparity 与 Depth
成 反比 若 Scene Point 位于无限远处,那么它在相机在平移前后所摄照片里会在一模一样的位置
Disparity 于 Baseline
成 正比 相机平移距离越长,同一个 Scene Point 在平移前后所摄照片里的 Disparity 越大
Disparity 仅存在于 Image Plane 的
轴 因为
轴数值完全相等
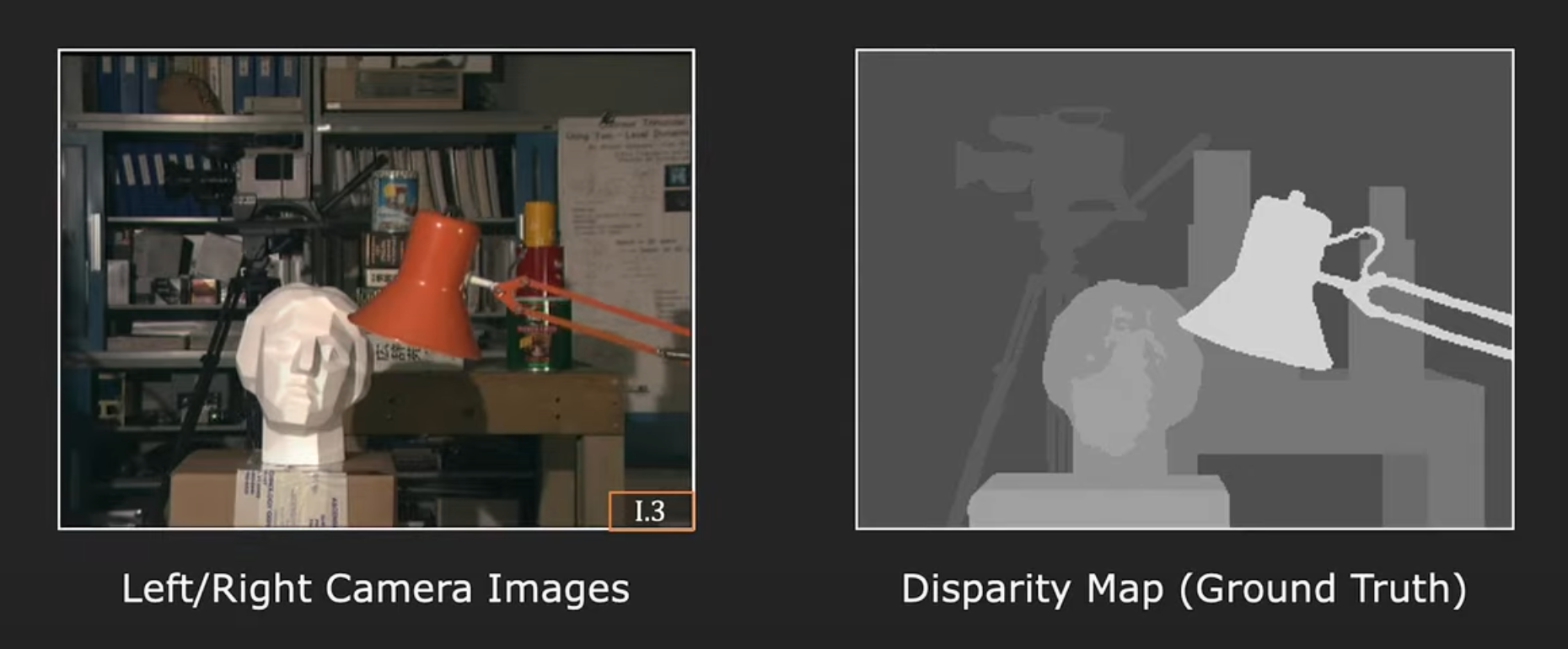
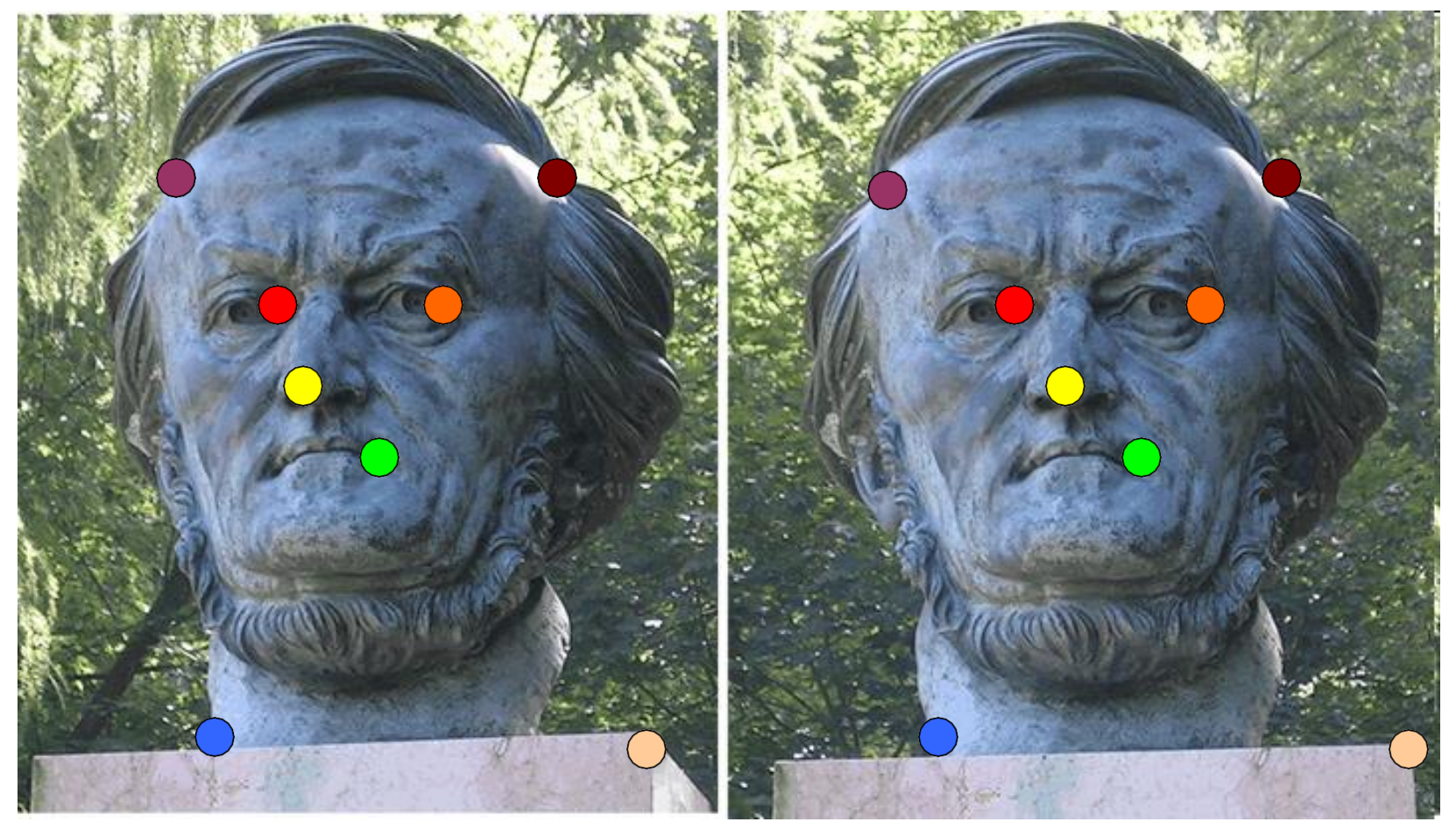
右图是用某些器械手动测量的左图场景的 Disparity Map
Map 中亮度越高的地方有更大的 Disparity
所以很明显,离相机越近,Disparity 越大,与 Depth 成反比
3.4 Stereo Matching
Given
- 用 Binocular Vision 拍摄的左右两张图片
- Binocular Vision 的相机配置
Find
Depth Map!
3.4.1 Template Matching
在左图选一个小窗口 Template Window
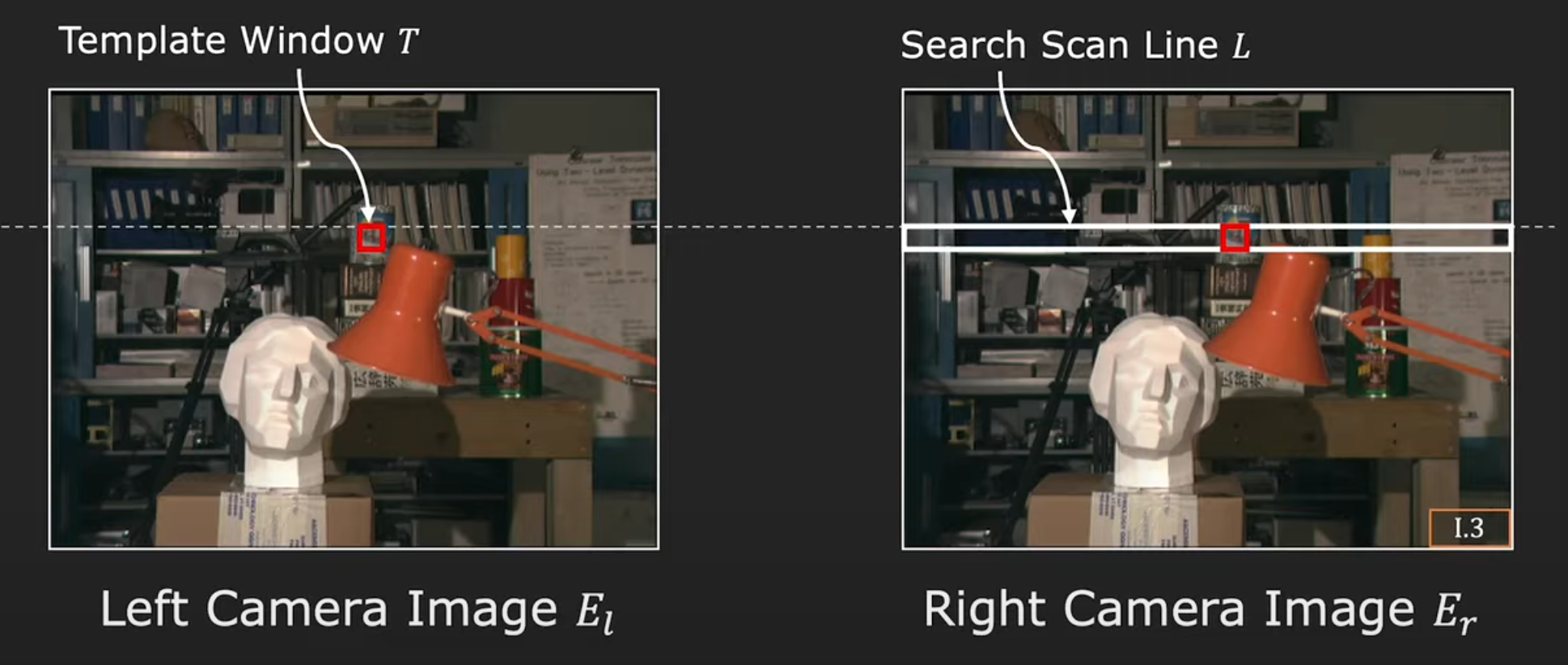
你只需要顺着一条线做 1D Search,然后用某些 Similarity Metric 匹配特征就能找到对应点
能找到对应点,就能找到
3.4.2 影响结果的因素
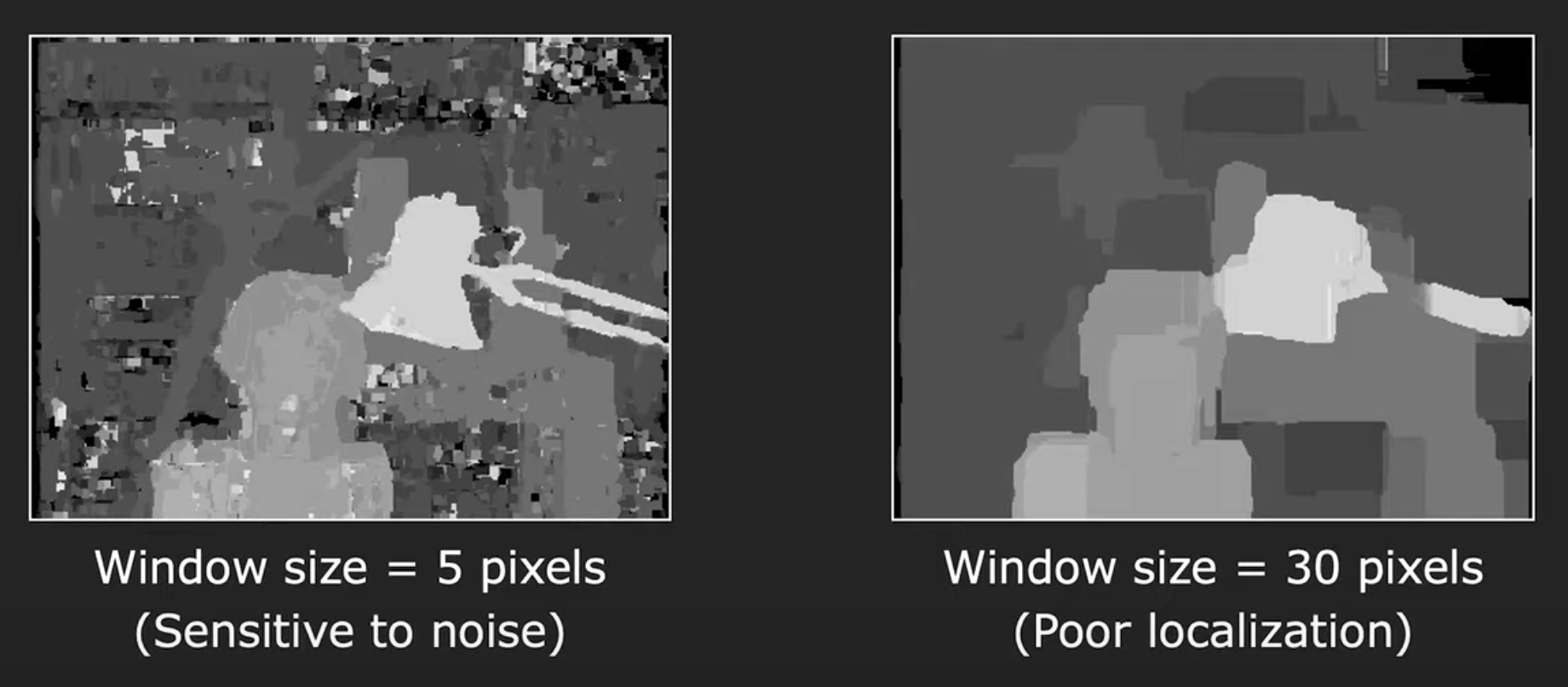
Window Size
在做 Template Matching 时,选取的 Template Window 大小会对最终结果造成某些影响,各有利弊
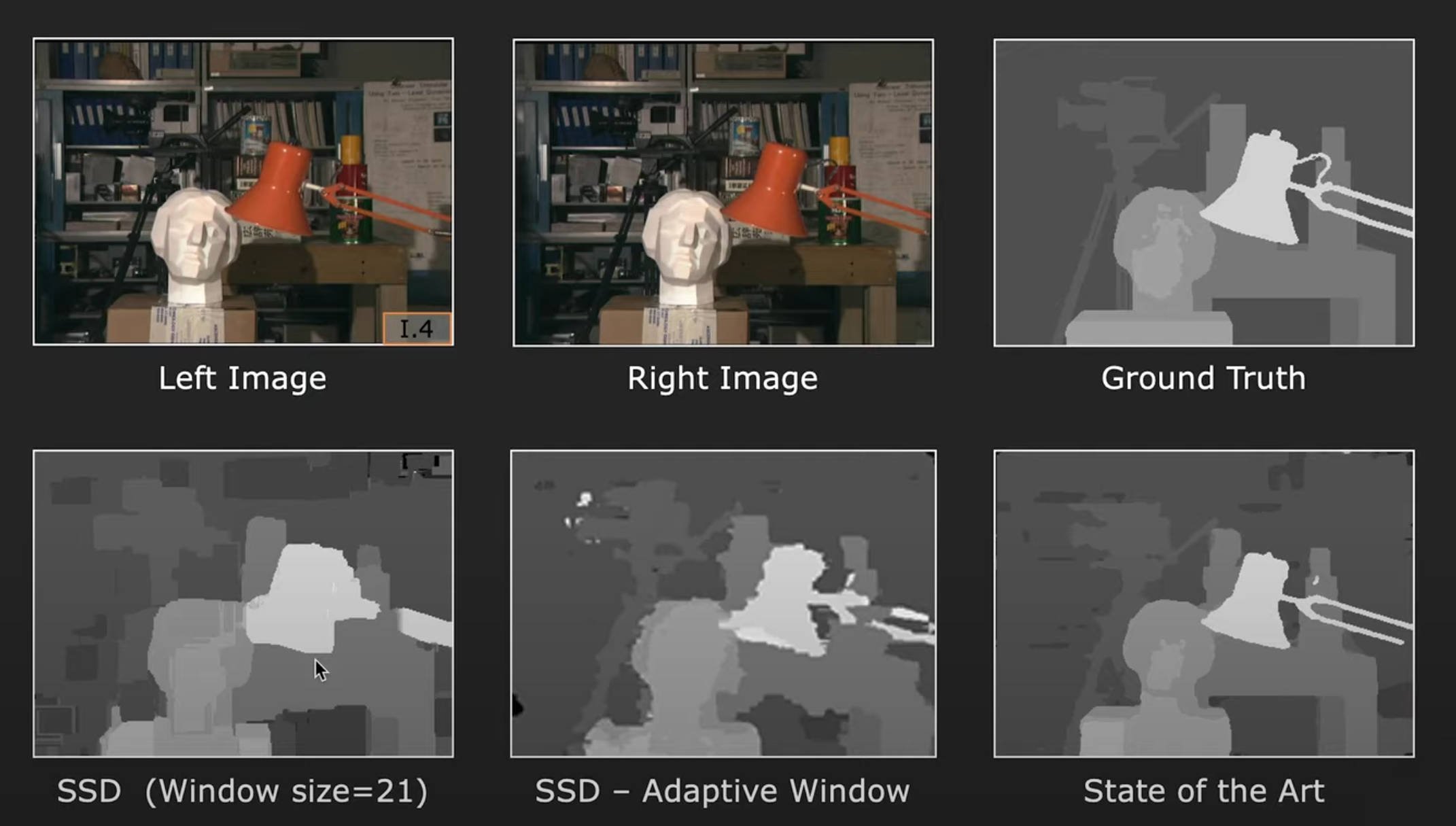
Similarity Metric
在做特征匹配时选的 Similarity Metric 也会有不同的效果
3.4.3 存在的问题
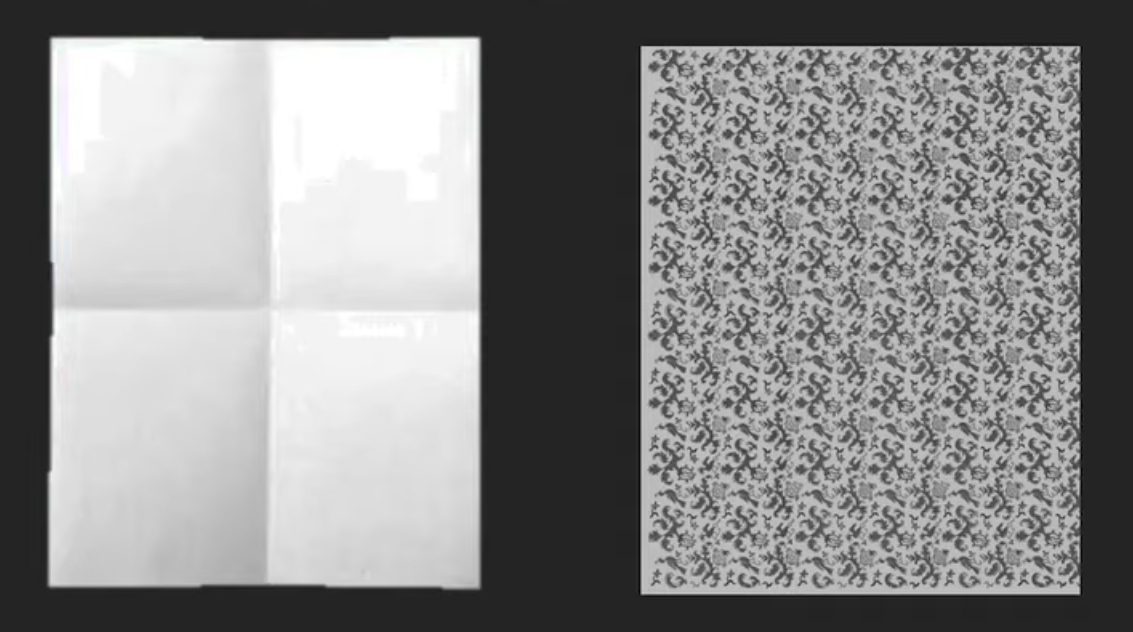
Repetitive Texture 重复 / 同质特征
下图这两种 Texture 可谓大寄特寄,取 Template Window 做匹配的时候到处都能匹配上
Foreshortening 透视缩短
下图中场景投影到左右两个 Image Plane 的是同一个区域,但是右侧成像长度比左侧更短,被压缩了,不太好匹配了!
遮挡
典中典的问题
4. 补充材料: Matrix Null Space
Null Space
Null Space of Matrix
is a set of vectors satisfying Nullity
Nulity of
is the dimension of Nullspace Rank-Nullity Theorem